了解技能命令的基本原理
技能命令基于多种操作模式。
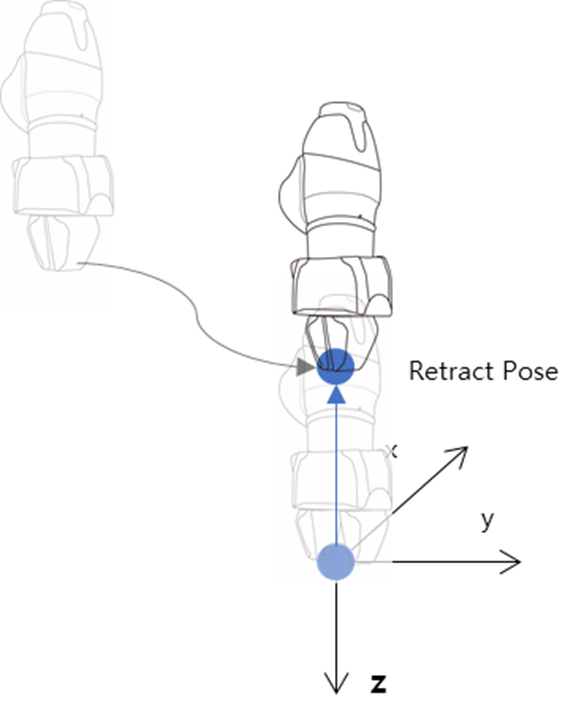
若想让机器人开始操作,必须配置机器人上装配的工具的重量和工具中心点 (TCP)。技能命令的基本操作模式必须具备垂直于参考位姿的接近位姿和撤回位姿。
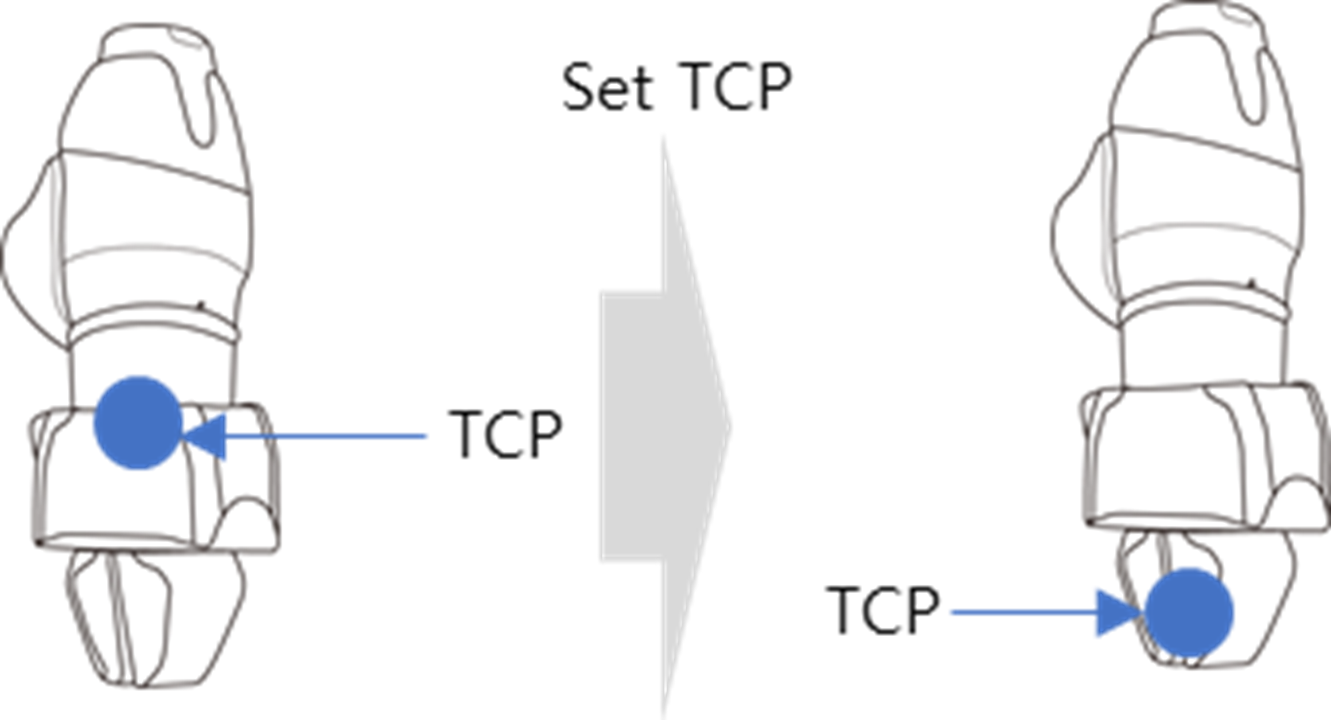
TCP 设置:使用末端执行器技能命令会自动更改 TCP 偏移设置。末端执行器技能命令执行阶段包括适用于末端执行器的 TCP 的偏移设置。如果 TCP 偏移发生变化,则无法使用可平稳连接先前运动命令的 Blending Motion(混合运动)功能。
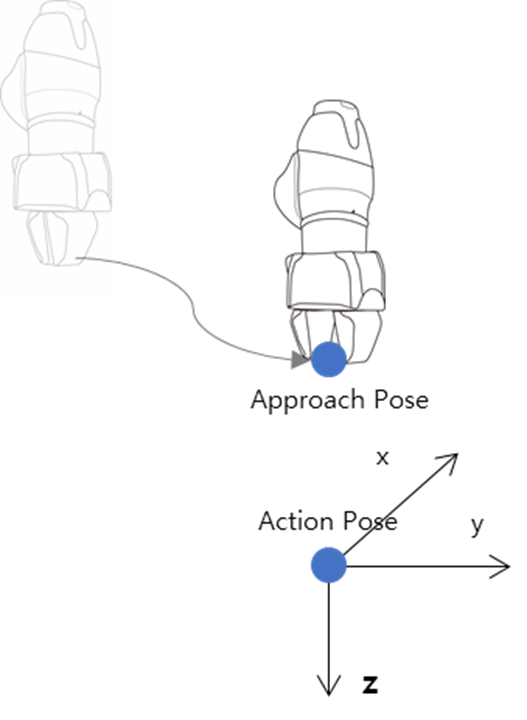
移至接近位姿:这是一个可以移至接近位姿的点。该点设在接近位姿的 Z 方向,也可以选择其他方向。将针对操作位姿自动计算输入的接近距离,随后移至相应点。
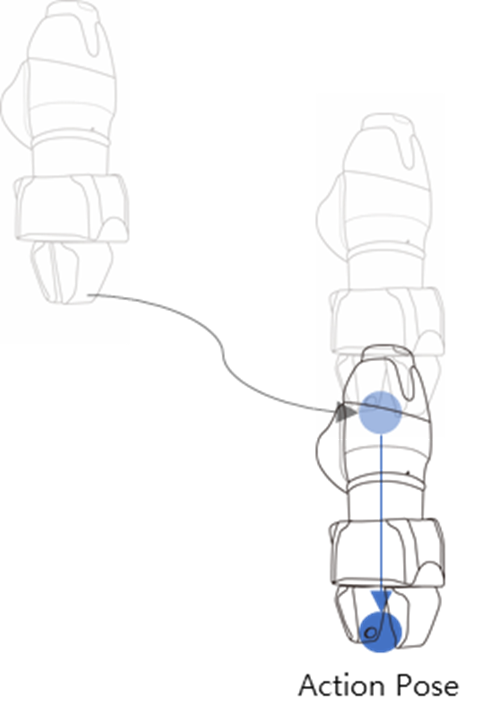
移动至参考位姿:这是末端执行器执行工作的工件上的点。要设置参考位姿的速度和加速度以外的详细坐标,请按参考位姿右侧的按钮。但是,在设置详细动作时使用相对坐标选项卡可能会导致技能执行过程
移至撤回位姿:可通过该点拾取工件并将其安全地移至另一点。该点在接近位姿的 Z 方向,也可以选择其他方向。将针对操作位姿自动计算输入的撤回距离,随后移至相应点。
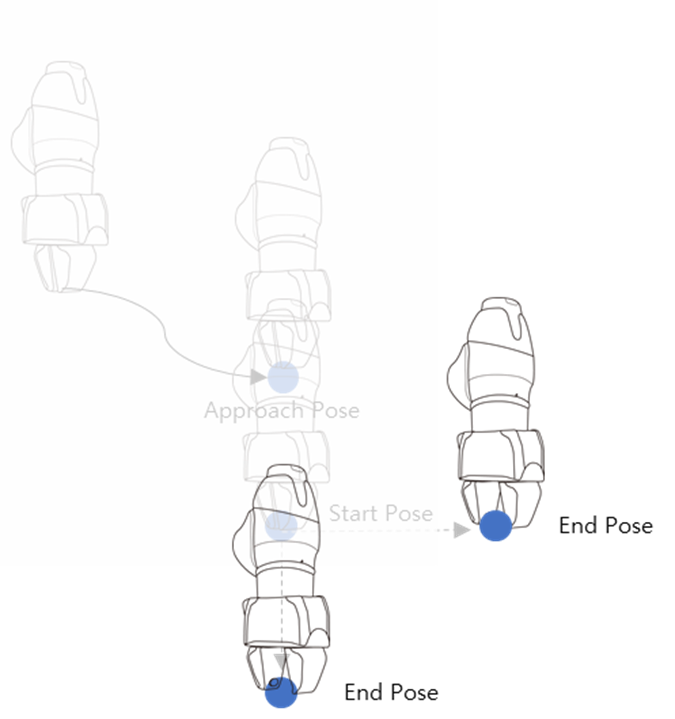
移至开始位姿:如果末端执行器执行目标并非以单次动作结束,可能会存在中间点和结束点,操作开始位姿是工作开始的点。(例如,Door_OpenClose Skill - Start Pose)
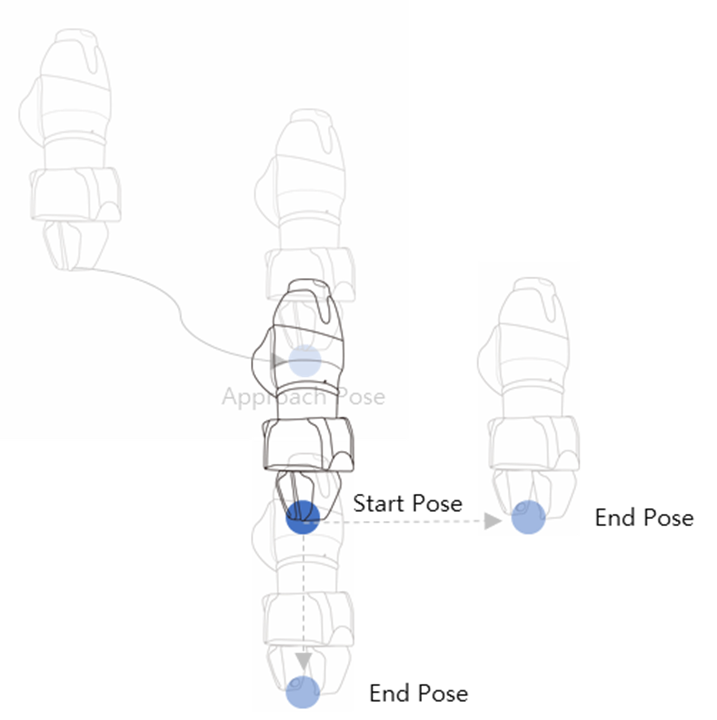
移至结束位姿:如果末端执行器执行目标并非以单次动作结束,可能会存在中间点和结束点,操作结束位姿是工作结束的点。(例如,Door_OpenClose Skill – End Pose)