
多段(路径点)设置
根据运动命令,可能需要配置两个或多个路径点。每个路径点都称为一个分段,添加路径点将在命令底部添加一行。需要两个或更多个分段的运动命令称为“多段运动命令”。
以下是配置 Move SJ 命令的示例。
- 点击命令属性中的 Add Pose(添加位姿)。
- 分段 1 随即会添加到 Move SJ 命令的最后一行。

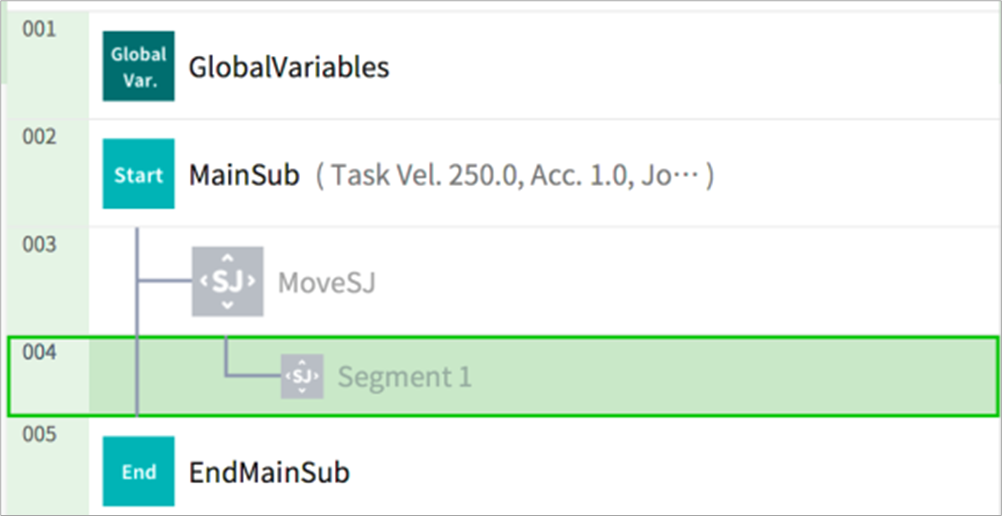
- 分段 1 随即会添加到 Move SJ 命令的最后一行。
- 使用点动功能或执行直接示教将工具移至预定位置。
- 点击分段属性中的 Save Pose(保存位姿)按钮,保存机器人工具位置。
- 重复步骤 1-3,添加分段。