
用户坐标设置
可以设置表示工件的坐标。该坐标称为用户坐标,与世界坐标不同。可以使用底座坐标或世界坐标设置用户坐标的位姿,可以在通过 Task Builder 和 Task Writer 使用机器人进行示教和移动时选择用户坐标。要设置用户坐标,可以在 Robot(机器人)工作单元上点击
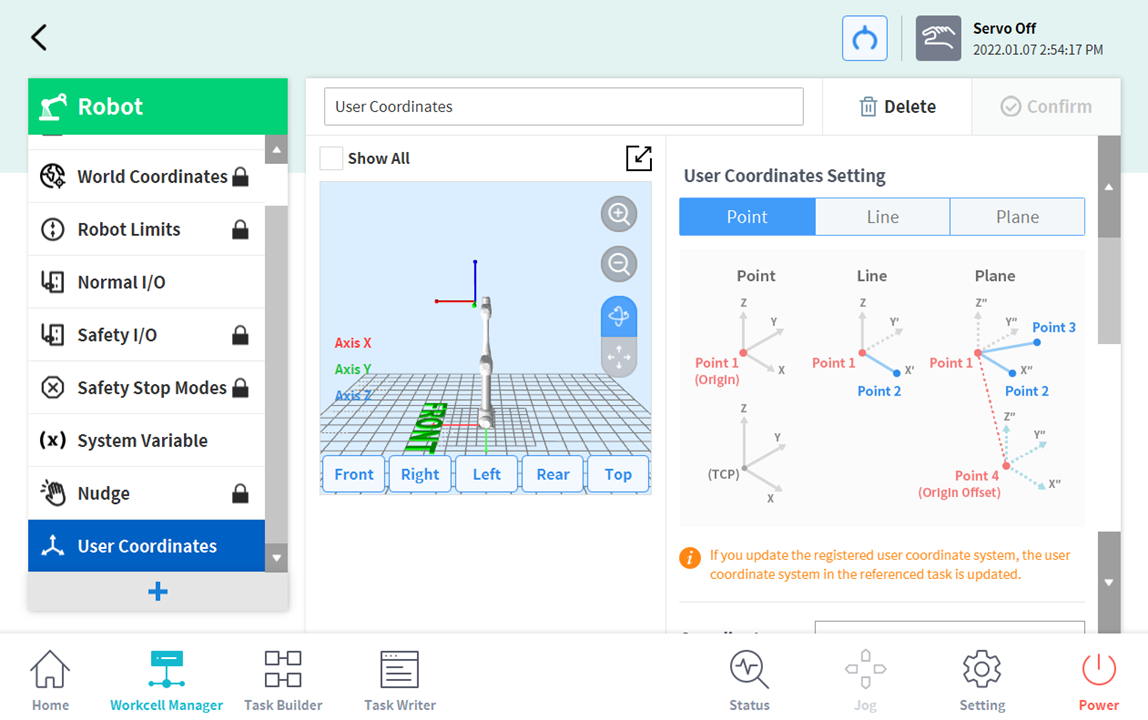
- 输入设置所需的值。
- 确保阅读了用户坐标的说明图片和注意事项。
- 可以基于 1 点、2 点和 3 点创建用户坐标。
- 可以从 Advanced Options(高级选项)中加载托盘坐标,并将其应用于用户坐标点。
可以设置表示工件的坐标。该坐标称为用户坐标,与世界坐标不同。可以使用底座坐标或世界坐标设置用户坐标的位姿,可以在通过 Task Builder 和 Task Writer 使用机器人进行示教和移动时选择用户坐标。要设置用户坐标,可以在 Robot(机器人)工作单元上点击