系统通电后,系统将启动。启动完成后,系统应用程序将显示在示教器上。有关系统应用程序的更多信息,请参见“ 程序画面配置”。
注
- 伺服开启:为了移动机器人位姿,机器人必须处于伺服开启状态,在该状态下,机器人的关节已通电,并且机器人处于待机状态。有关伺服开启的更多信息,请参见“ 伺服开启”。
- 日期和时间设置:由于示教器上以及保存在机器人上的日志消息中显示的日期和时间与系统的日期和时间设置一致,因此必须在初次启动时配置日期和时间。有关如何配置日期和时间的信息,请参见“ 日期和时间设置”。
- 若使用 DART Platform,无需示教器即可控制机器人。
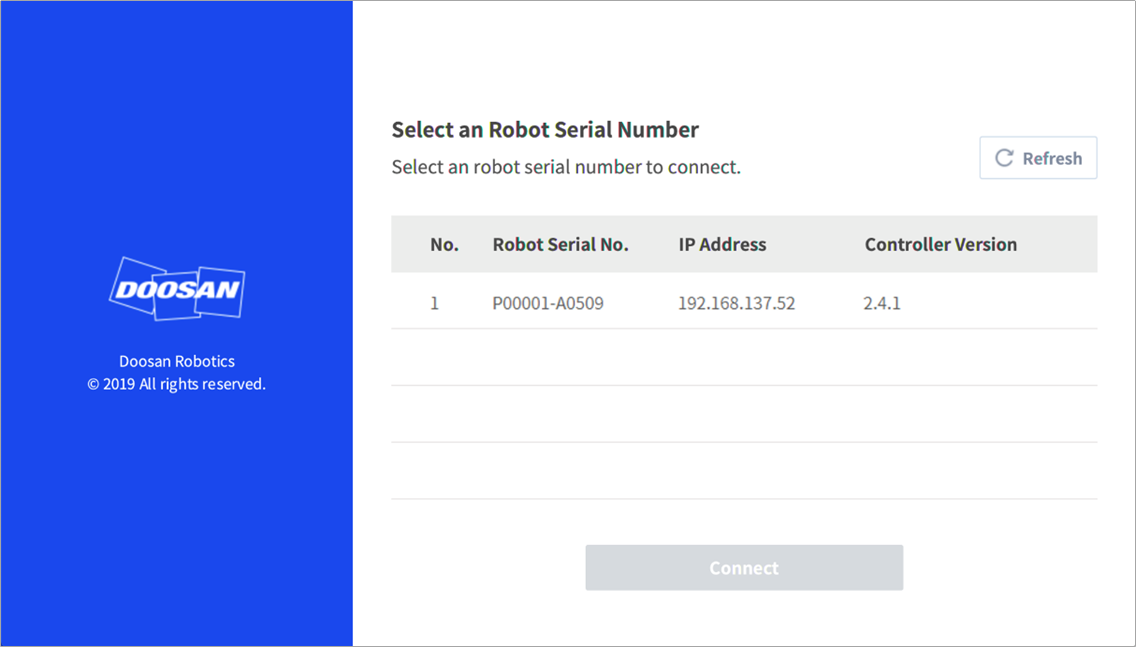
- DART Platform 会显示一个屏幕,其中显示启动后已连接到网络的机器人,用户可在该屏幕中执行检查机器人序列号以及连接到机器人的过程。