碰撞灵敏度降低区域设置
要设置碰撞灵敏度降低区域,请在机器人工作单元中点击 
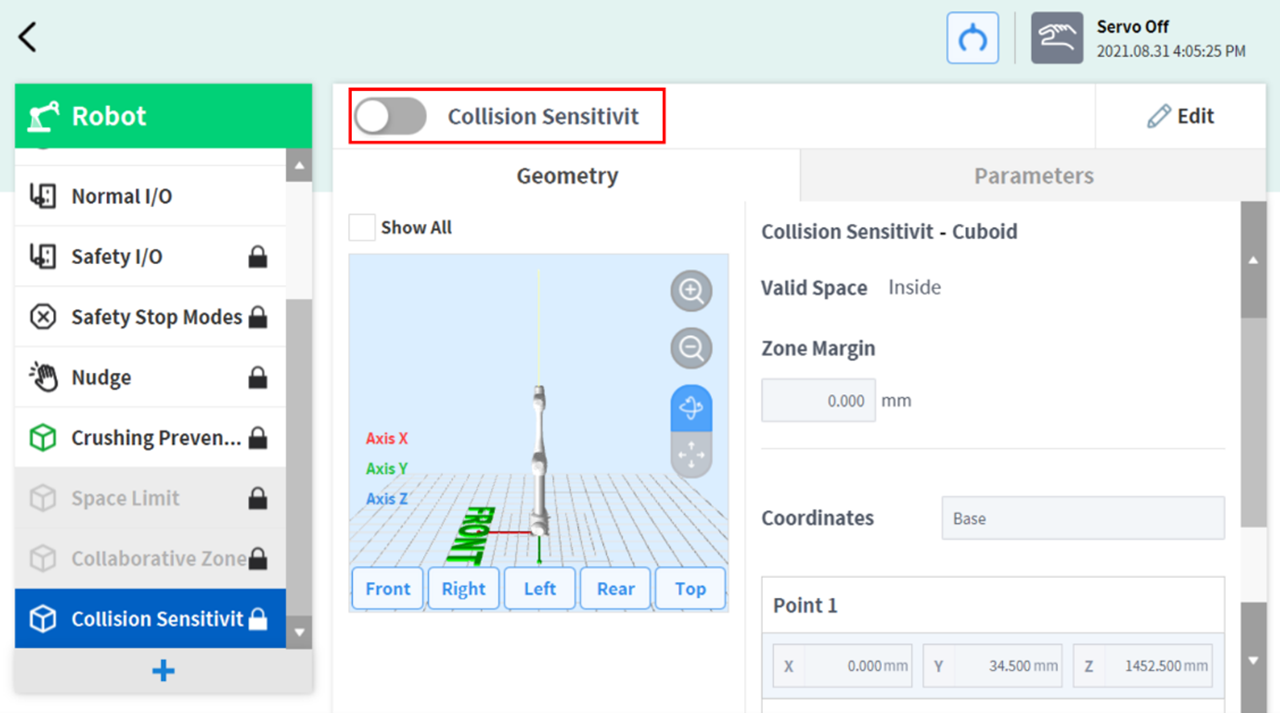
- 在 Workcell Setting(工作单元设置)屏幕顶部的 Workcell Name(工作单元名称)字段中输入工作单元名称。
- 根据区域形状以及“几何图形”选项卡中的“有效空间”和“区域边距”设置位姿信息。
在“参数”选项卡下设置覆盖选项、TCP/机器人限制和动态区域启用,然后按草稿。
警告
- 碰撞灵敏度降低区域是高优先级区域。
- 高优先级区域优先于其他区域和全局机器人限制设置。如果多个高优先级区域重叠,则安全功能使用受限程度最低的安全限制。由于这些原因,应将高优先级区域的大小指定为尽可能小,以保障安全
- 验证显示的所有参数与期望设置的参数相同,然后选中“确认草稿”并按“确认”
- 按下 Activate Toggle(激活切换)按钮以应用碰撞灵敏度降低区域。