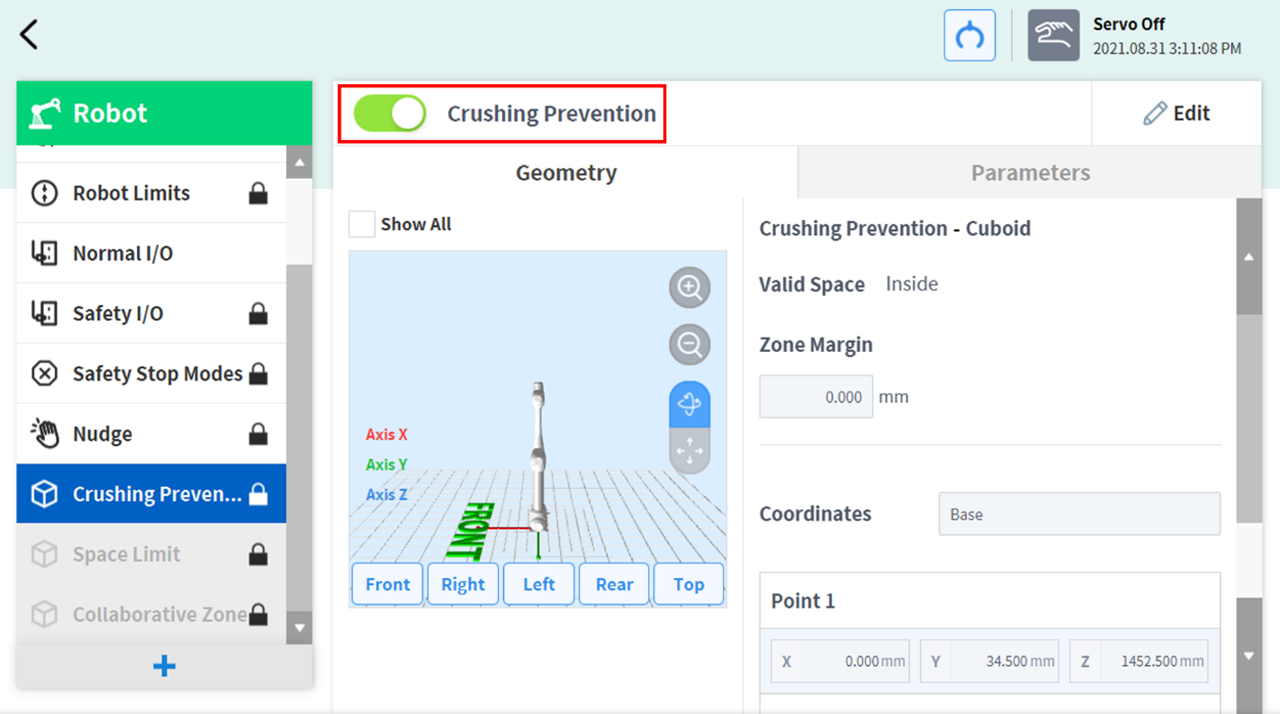
要设置防撞区域,请在机器人工作单元中点击 “添加”按钮,然后选择防撞区域 > 正立方体、圆柱体、多平面箱、球体或斜立方体。设置和启用过程中需提供安全密码。
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.