
空间限制设置
要设置机器人的空间限制,请在机器人工作单元中点击 
- 在 Workcell Setting(工作单元设置)屏幕顶部的 Workcell Name(工作单元名称)字段中输入工作单元名称。
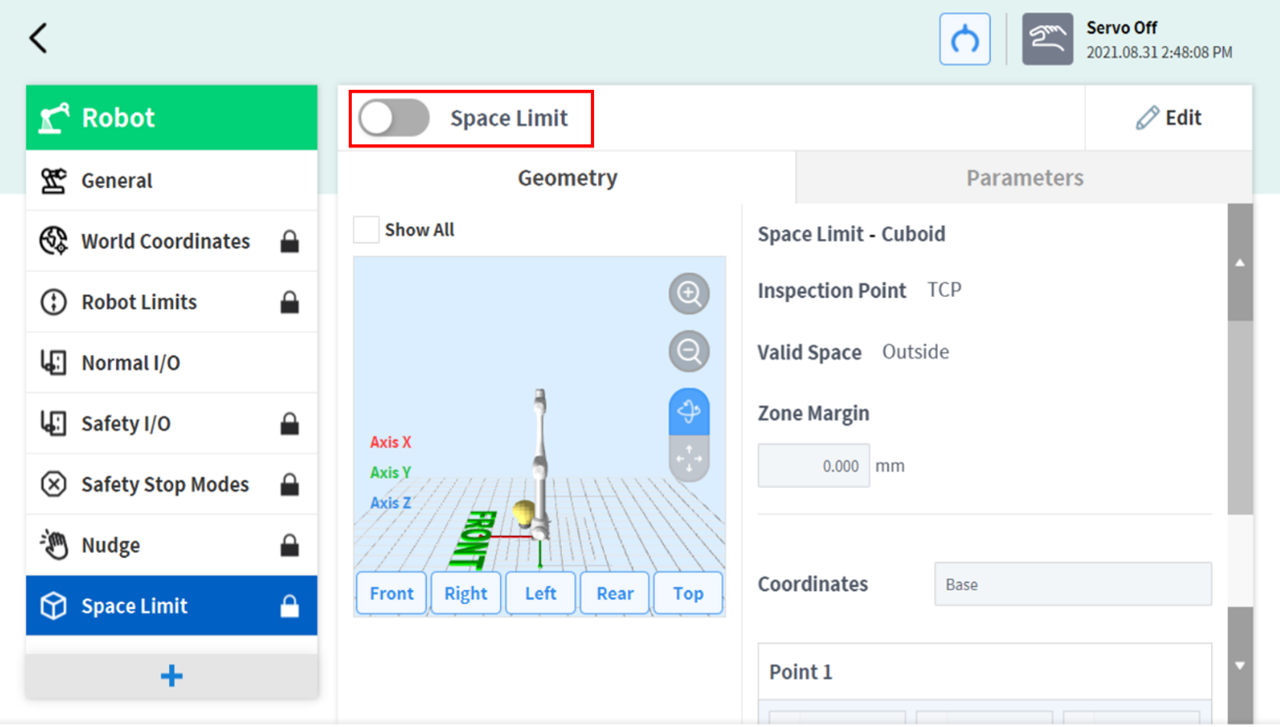
- 根据空间限制形状以及几何图形选项卡中的检查点、有效空间和检查边距设置位姿信息。
- 在参数选项卡下设置动态区域启用和高级选项,然后按下草稿。
- 验证显示的所有参数与期望设置的参数相同,然后选中“确认草稿”并按“确认”
- 按下 Activate Toggle(激活切换)按钮以应用空间限制。
注
区域边距的默认值取决于设置方法。
- 如果设置了工具形状且未选择本体体积检查,则 TCP 边距值为 0 mm。
- 如果设置了工具形状且选择了本体体积检查,则 TCP 边距值为 0 mm。
- 如果未设置工具形状且未选择本体体积检查,则 TCP 边距值为 0 mm。
- 如果未设置工具形状且选择了本体体积检查,则 TCP 边距值为 60 mm。