
基于机器人底座执行
要基于机器人底座移动机器人,请执行以下步骤:
在 Jog(点动)屏幕中选择 Task(任务)选项卡。
选择要用作基准的显示坐标,然后选择 Base(底座)作为任务坐标的参考点。
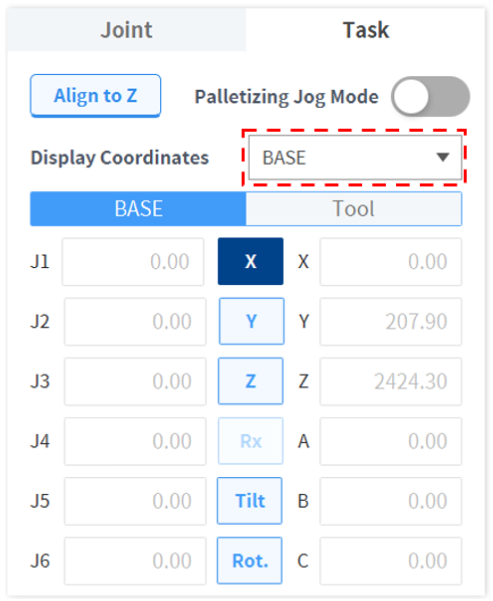
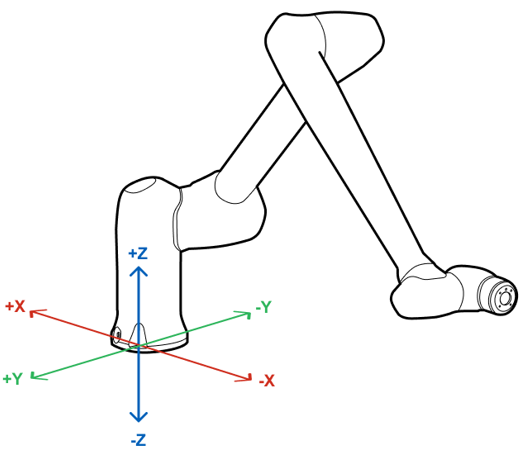
选择要移动的底座坐标。(P 系列型号的 Rx 无效)
按住 Direction(方向)按钮(


注
安全区域不适用于虚拟模式。
要基于机器人底座移动机器人,请执行以下步骤:
在 Jog(点动)屏幕中选择 Task(任务)选项卡。
选择要用作基准的显示坐标,然后选择 Base(底座)作为任务坐标的参考点。
选择要移动的底座坐标。(P 系列型号的 Rx 无效)
按住 Direction(方向)按钮(
安全区域不适用于虚拟模式。