
路径点设置
配置命令路径点的操作步骤如下:
- 选择参考坐标的类型(Absolute(绝对),Relative(相对))和坐标值。
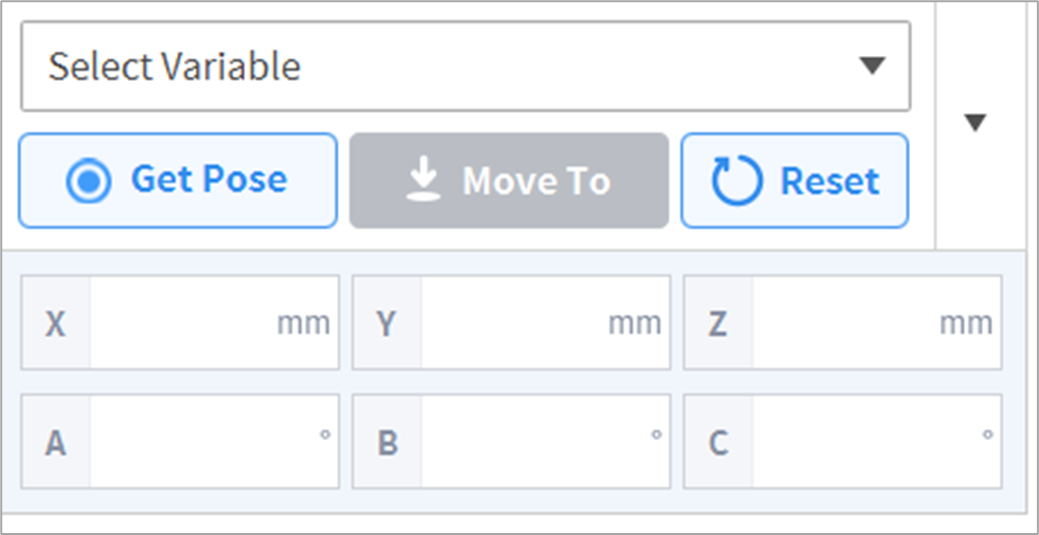
- 使用点动功能或执行直接示教将机器人移至预定位置。
- 点击 Save Pose(保存位姿)按钮,保存机器人工具位置。
- 必要时,可以使用 GlobalVariables 或 Define 命令定义变量。
- 必要时,可以使用 GlobalVariables 或 Define 命令定义变量。
注意
- 投影姿势将输入的坐标值转换为5自由度机器人可以移动的坐标值。
- 投影姿势按钮仅在P系列型号上支持。