
基于关节执行
要基于机器人关节调整角度,请执行以下步骤:
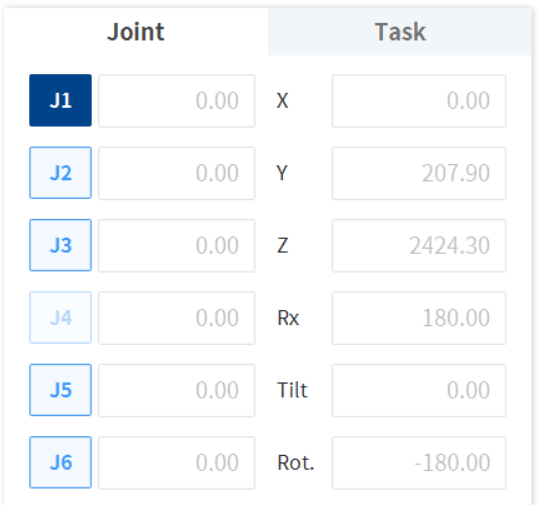
在 Joint(关节)屏幕中选择 Joint(关节)选项卡。
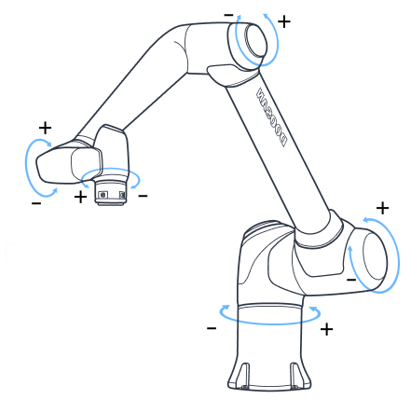
选择轴 (J1-J6) 以调整角度。(P 系列机型禁用 J4)
按住 Direction(方向)按钮(


注
安全区域不适用于虚拟模式。
要基于机器人关节调整角度,请执行以下步骤:
在 Joint(关节)屏幕中选择 Joint(关节)选项卡。
选择轴 (J1-J6) 以调整角度。(P 系列机型禁用 J4)
按住 Direction(方向)按钮(
安全区域不适用于虚拟模式。