
法兰 I/O
机器人末端法兰盖上有一个M8规格的8针连接器,其位置和形状参考下图。
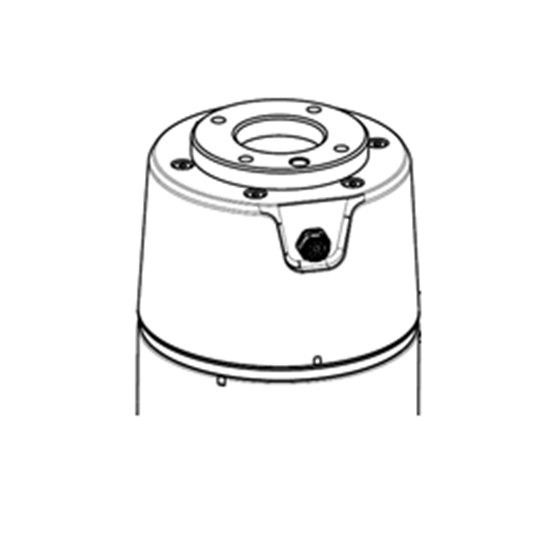
该连接器用于提供操作特定机器人工具内置的夹持器或传感器所需的电源和控制信号。以下是工业电缆示例(可以使用等效电缆):
Phoenix contact 1404178 (直头)
Phoenix contact 1404182 (直角)
示意图
每个连接器的针脚图如下所示:
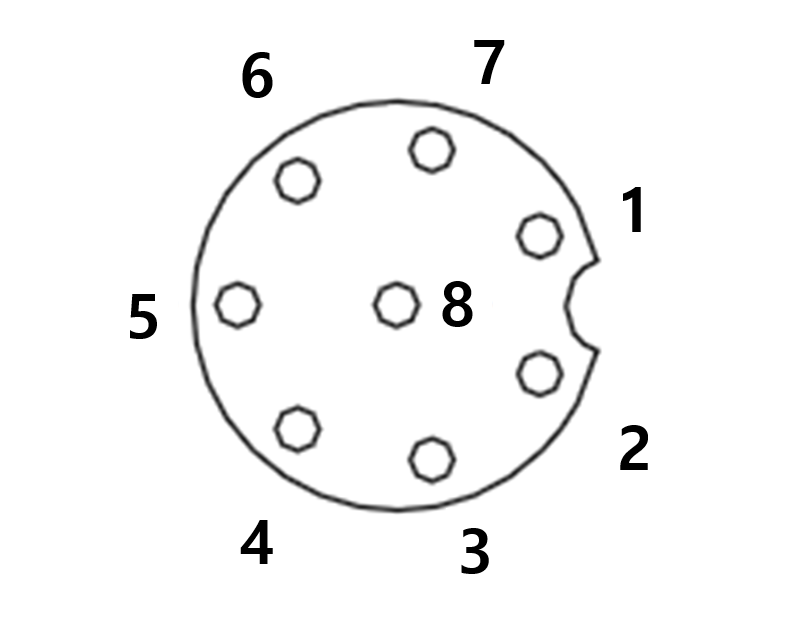
X1连接器提供的详细I/O配置请参阅下表。
自 2024 年 11 月 4 日起,已进行如下更改。
X1 设置
No | Signal type | Description |
|---|---|---|
1 | Digital Input 1 | PNP(源类型,默认) |
2 | Digital Output 1 | 设置为 PNP(源类型,默认)或 NPN(接收器类型) |
3 | Digital Output 2 | 设置为 PNP(源类型,默认)或 NPN(接收器类型) |
4 | Analog Input 1 / RS-485 + | 设置为电压 (0-10V) 或电流(4-20mA,默认) / 最大1M波特率 |
5 | Power | 将内部电源设置为 +24V(默认)、+12V 或 0V |
6 | Analog Input 2 / RS-485 - | 设置为电压 (0-10V) 或电流(4-20mA,默认) / 最大1M波特率 |
7 | Digital Input 2 | PNP(源类型,默认) |
8 | GND |
法兰输入/输出(I/O)初始电源设置为0V,可设置为12V或24V。
I/O连接时的详细电源规格请参考下表。
Parameter | Min | Type | Max | Unit |
|---|---|---|---|---|
Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
Supply current | - | - | 3 | A |
ㅤ
2024 年 11 月 4 日之前的 I/O 配置如下。
X1 设置(数字 I/O、RS 485)
No | Signal type | Description |
1 | Digital Input 1 | PNP(源类型,默认) |
2 | Digital Output 1 | 设置为 PNP(源类型,默认)或 NPN(接收器类型) |
3 | Digital Output 2 | 设置为 PNP(源类型,默认)或 NPN(接收器类型) |
4 | RS485 A | 最大1M波特率 |
5 | Power | +24V |
6 | RS485 B | 最大1M波特率 |
7 | Digital Input 2 | PNP(源类型,默认) |
8 | GND |
警告
请先根据生产日期(机器人标签上的制造日期)检查 I/O 配置,然后再配置工具和夹持器。
有关信息,请访问 Doosan 机器人实验室网站。(https://robotlab.doosanrobotics.com)
如果运行机器人工具时忽略了 I/O 配置,产品可能会永久损坏。
法兰盘I/O内部电源设置为24V,I/O连接时详细电源规格请参考下表。
参数 | 最小值 | Typ | 最大值 | 单位 |
电源电压 | - | 24 | - | V |
电源电流 | - | 2 | 3 | A |
数字输出 | - | 2 | - | EA |
数字输入 | - | 2 | - | EA |
警告
设置工具和夹持器,使其在切断电源时不会造成任何危险。
(例如,workpiece 从工具上坠落)
在向机器人供电时,每个连接器的 5 号端子始终输出 24V 电压,因此在设置工具和夹持器时,请确保切断机器人的电源。