
操作台按钮(五个按钮)
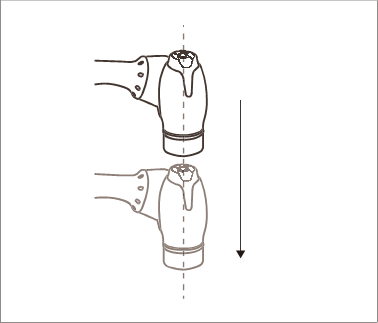
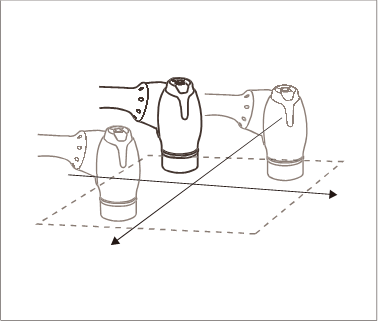
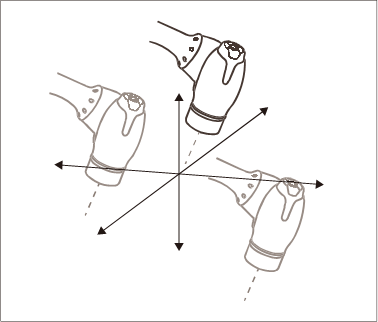
用户可以按住 Hand-guiding(手动引导)按钮或操作台上的 custom(自定义)按钮以更改机器人的位姿。
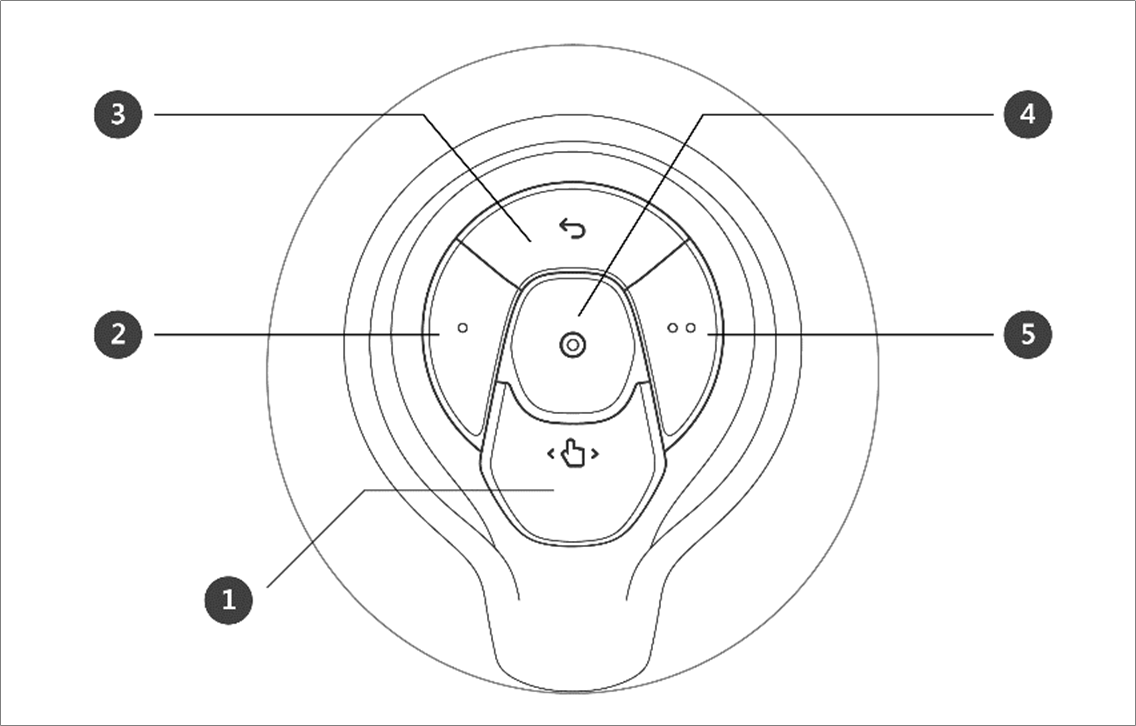
编号 | 项 | 说明 |
|---|---|---|
1 | Hand-Guiding Button | 此按钮可用于调整或更改机器人位姿。 |
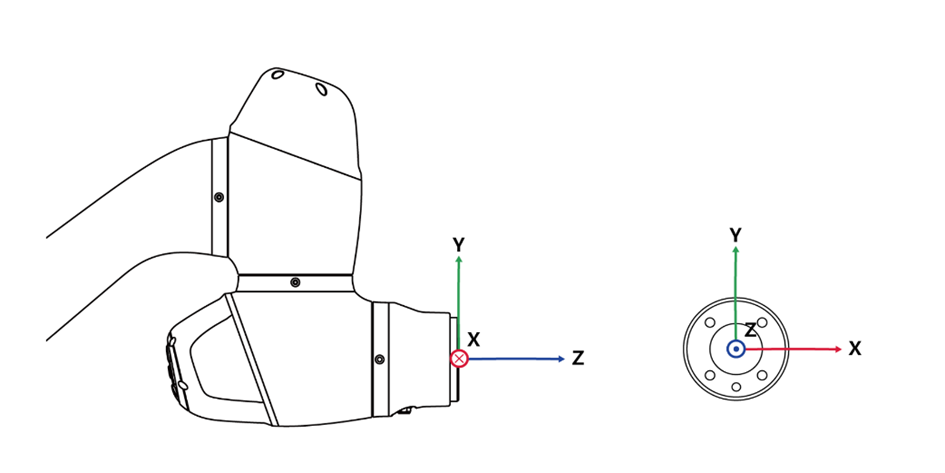
2,5 | 用户设置按钮(约束运动) | 此按钮可以通过输入基于具体模式对应锁定条件的位姿来修改机器人位姿。
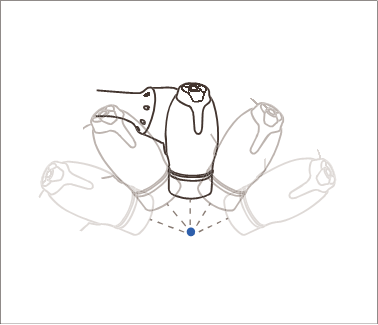
 有关设置的更多信息,请参见“操作台设置”。 |
3 | Cancel Button | 删除最近保存的位姿。 |
4 | Save Pose Button | 保存当前机器人位姿。有关更多信息,请参见“使用操作台按钮进行技能命令工作点设置”。 |
注意
没有 FTS 的 A 系列型号(A0509、A0912)无法使用用户设置按钮(约束运动)。
带有 FTS(A0509S、A0912S)的 A 系列型号能够使用用户设置按钮(约束运动)。
固定运动依赖于连接在机器人尖端的 FTS;因此,固定运动对于连接工具以及机器人在移动时夹持工具是必不可少的。在握住本体的同时移动机器人不会引发机器人做出反应。
有关每个机器人系列的功能限制的详细信息,请参阅“每个机器人系列的功能限制”。