
什么是奇异性?
多关节机器人中的奇异性是指在移动过程中机器人难以计算下一个姿势的位置 (或点)。多关节机器人根据机械手末端计算运动过程中的每个关节角度
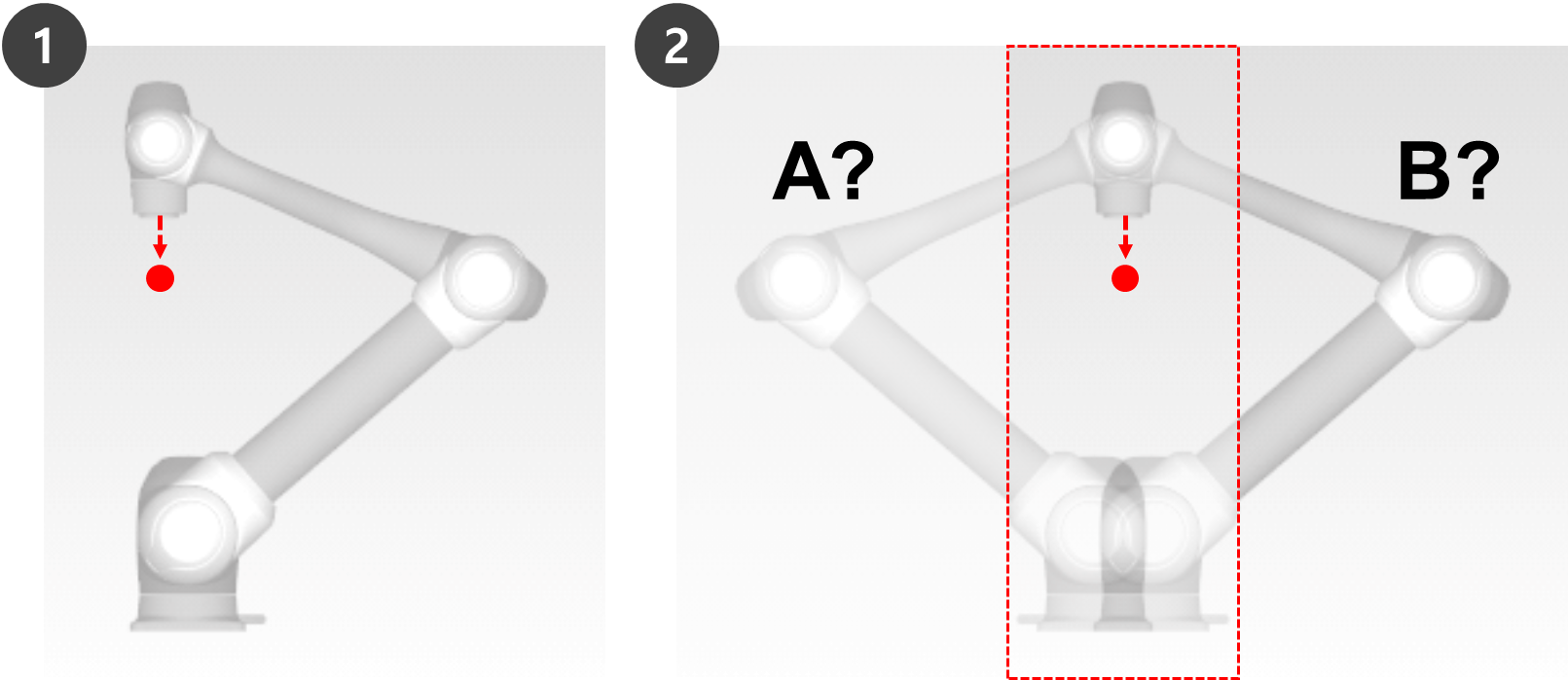
例如,在图 1 下面,当机械手移动到红点时,机械手将无法确定是移动其接头来设置 A 姿势还是 B 姿势,如图所示。此位置 (或点) 称为奇异性。
接近奇异性时,机械手的运动在平面,点和线方面不会流动,机械手末端的线性运动可能不会保持不变,控制过程中的位置误差可能会增加。奇异性在三种情况下发生,如下图所示,包括机械手接头形成一条直线时。
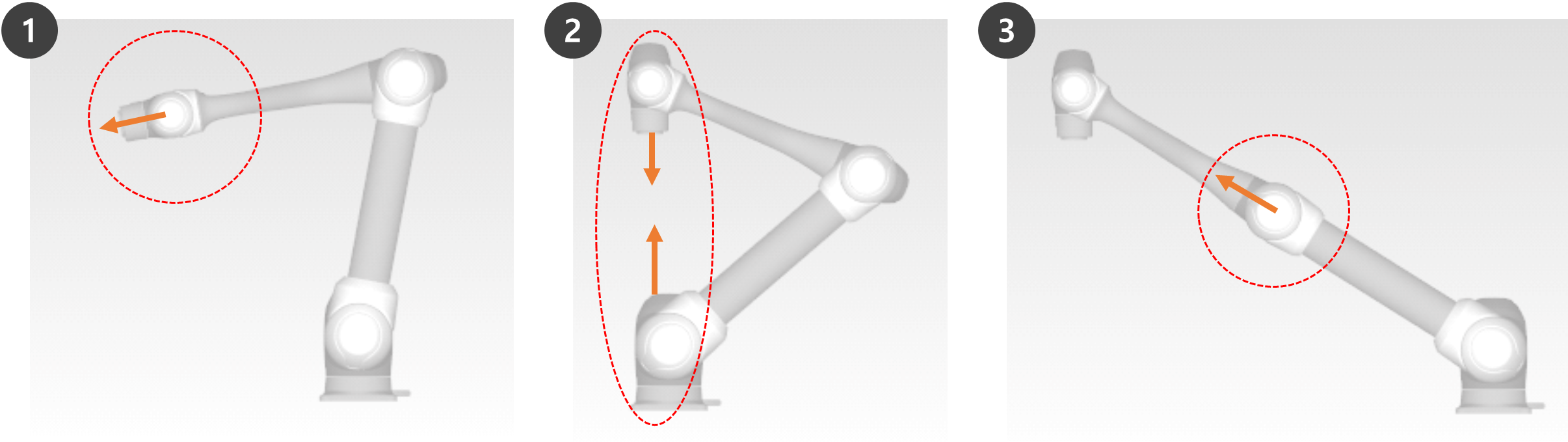
腕关节奇异性:当机械手腕部形成一条线,轴 5 接近 0º º 时
与人机臂相比,轴 4 , 5 和 6 对应于腕关节。
肩部奇异性:当轴 1 和 6 位于同一条线上时
与人机臂相比,轴 1 和轴 2 与肩关节相对应。
弯管奇异性:当机械手形成一条直线时,轴 3 接近 0º
与人机臂相比,轴 3 与肘部相对应。
小心
手动和自动操作通过关节旋转移动不受奇异性的影响。
任务移动, MoveL 命令等
只有在机械手结束线性移动的手动和自动操作过程中才会出现奇异性。
联合移动, MoveJ 命令等
在奇异性区域,力控制或合规控制不可用。
当线性运动通过奇异性时,某些轴的旋转速度会快速增加,因此可能会发生违反联合速度极限或违反联合角度极限的情况。
如何避免奇异性
斗山机器人提供了多种选择,可避免在运动控制过程中出现奇异性。但是,建议配置一个不使用关节移动命令 (如奇异性区域中的 MoveJ) 创建异常的任务。
以下是 Doosan Robot 提供的奇点规避选项:
自动规避:通过避开奇点来执行运动。但是,机器人运动可能与预期路径不同。
路径优先:保持路径和速度,但可能会因奇点附近的错误而停止。
变速:保持路径,但在奇点附近减速。