远程控制设置
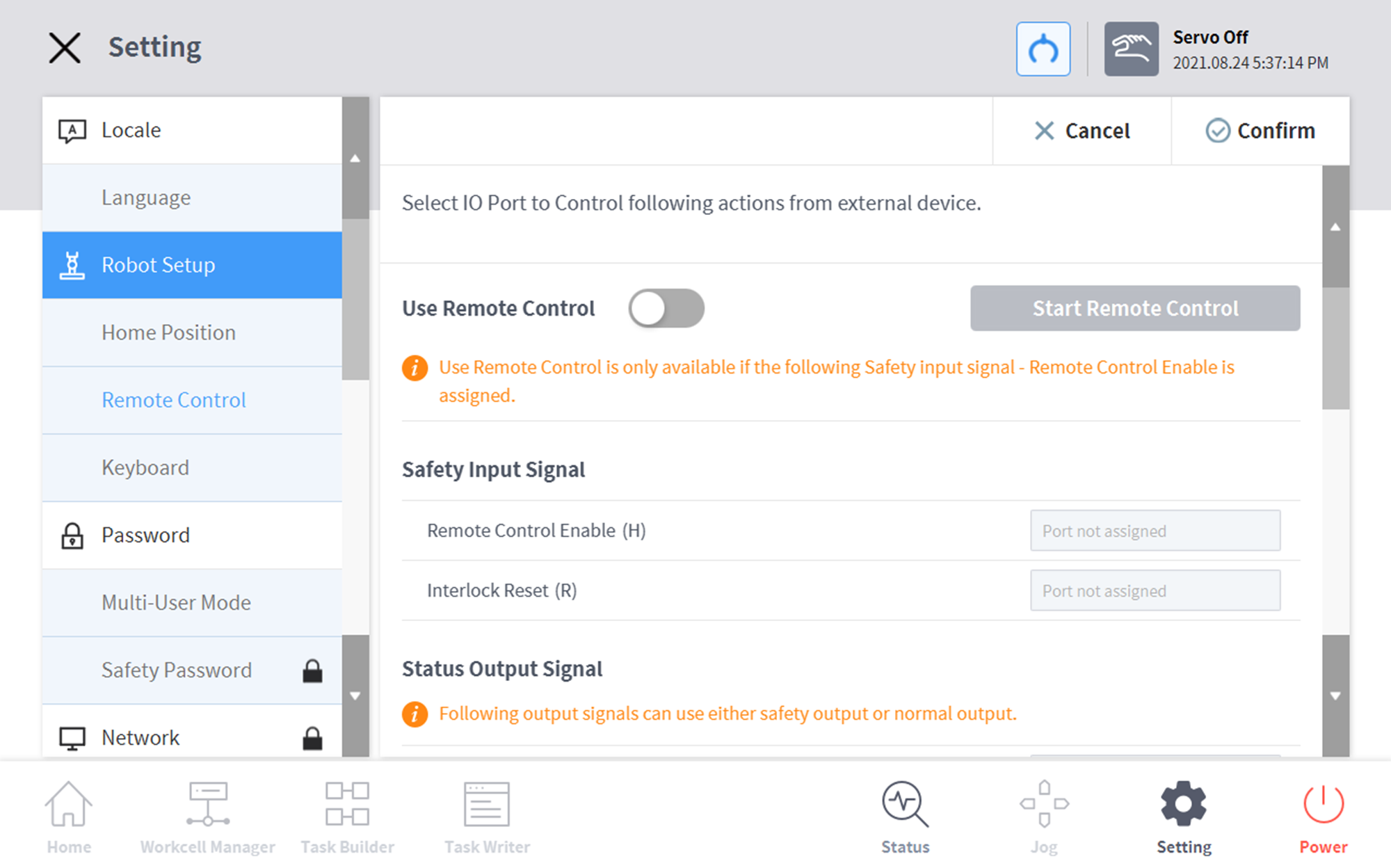
- 在设置 > 机器人设置菜单中选择远程控制菜单。
- 当前设置信息显示在设置管理窗口中。
- 设置安全输入信号。
- 在 Workcell Manager > 安全 I/O > 输入选项卡中,选择编辑 > 端口并设置远程控制启用 (H)。
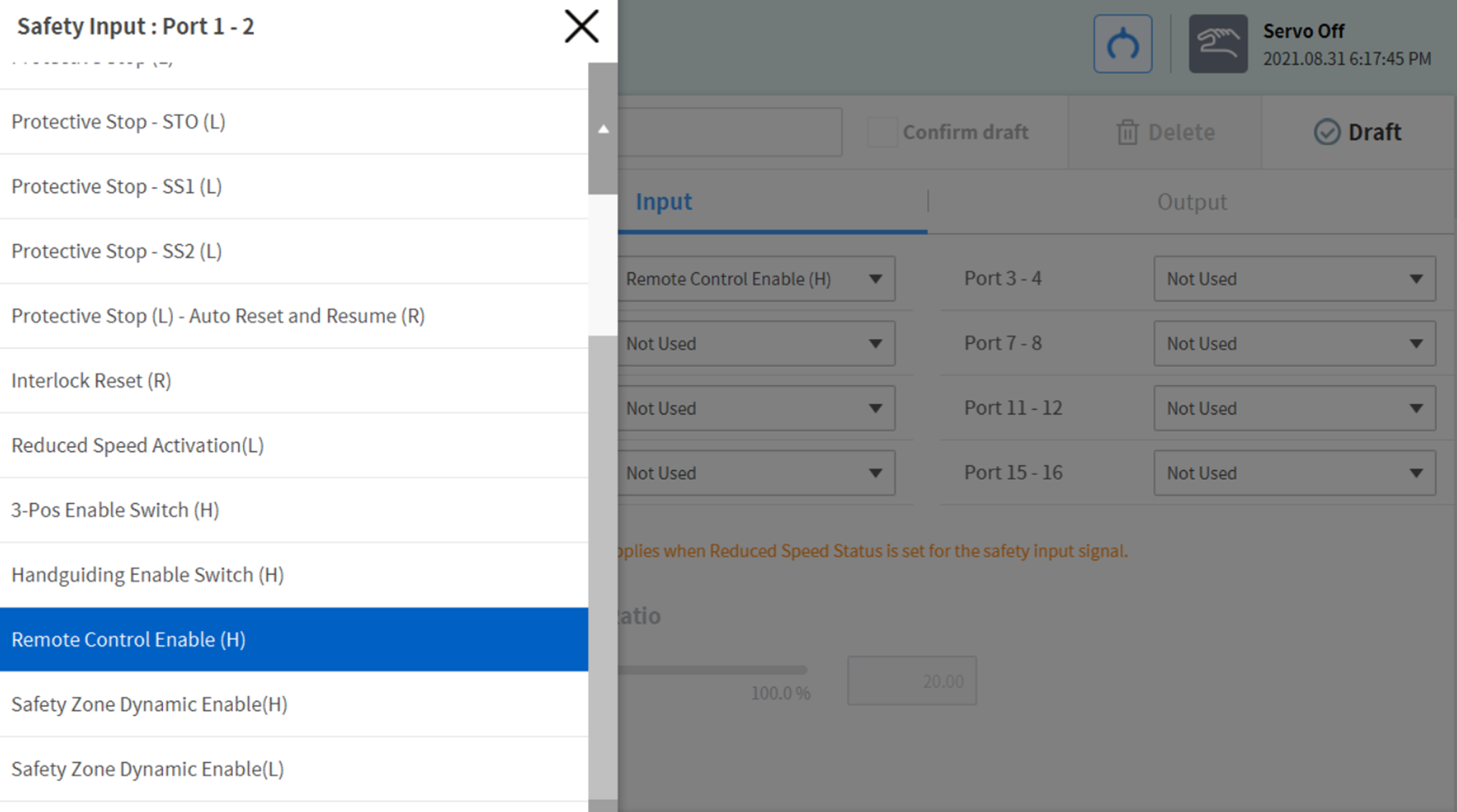
- 在 Workcell Manager > 安全 I/O > 输入选项卡中,选择编辑 > 端口并设置远程控制启用 (H)。
- 将使用远程控制按钮设置为 ON。
- 如果在远程控制设置为 ON 的情况下重新启动系统,它将以远程控制模式启动。

- 如果在远程控制设置为 ON 的情况下重新启动系统,它将以远程控制模式启动。
- 输入状态输出信号选择值
- 可以在 Workcell Manager > 安全 I/O 输出选项卡和正常 I/O 输出选项卡中设置输出信号。
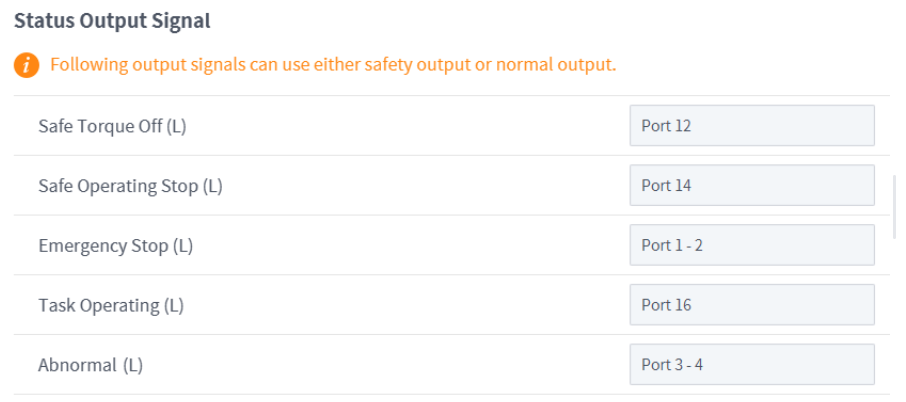
- 安全 I/O 设置项
- 紧急停止 (L)
- 异常 (L)
- 正常 I/O 设置项
- 安全扭矩关闭 (L)
- 安全操作停止 (L)
- 任务操作 (L)
- 可以在 Workcell Manager > 安全 I/O 输出选项卡和正常 I/O 输出选项卡中设置输出信号。
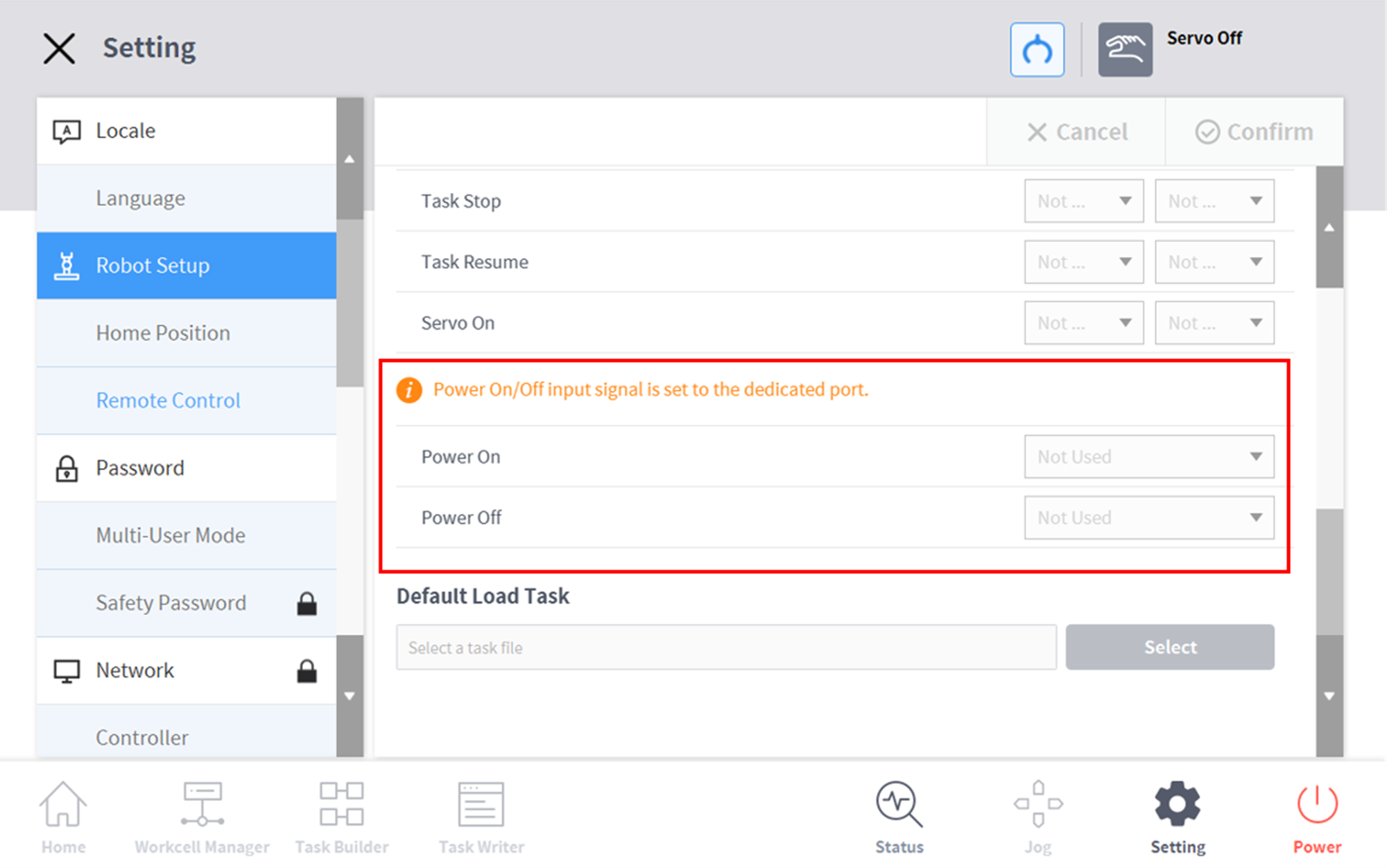
- 输入控制输入信号选择值
- 如果未设置安全输入信号,则无法设置远程控制使用按钮 ON。
- 输入默认加载任务选择值
- 如果未设置安全输入信号,则无法设置远程控制使用按钮 ON。
- 完成后点击确认按钮。
- 这样就完成了远程控制的环境设置。

- 这样就完成了远程控制的环境设置。
- 要允许使用外部设备进行远程控制,请点击启动远程控制按钮以进入远程控制模式。
- 显示有关从外部设备执行的任务的信息。
- 只有当“启用远程控制”按钮上显示绿色信号时,才能执行来自外部设备的运动输入。
- 如果启用远程控制按钮上显示红色信号,请从外部设备输入启用信号。
注
- 如果在远程控制模式下发生紧急停止或保护停止,则其处理方式如下:
- 紧急停止:显示紧急停止弹出窗口。排除紧急停止原因后 — 拉动或扭动紧急停止开关进行复位,弹出窗口将自动关闭。
- 保护性停止导致过渡到伺服关闭状态:显示红色保护停止弹出窗口。如果在排除保护性停止原因后输入“伺服开启”信号,则机器人伺服驱动器打开,弹出窗口自动关闭。
- 保护性停止导致过渡到中断状态:显示黄色保护停止弹出窗口。如果在消除保护性停止的原因后输入互锁复位信号,机器人状态将转变为正常待机状态 — 手动待机、自动待机或 HGC 待机。
如果不移动机器人便无法消除原因的安全违规情况,可以使用“通过操作台进行夹紧脱离” - 每种模式状态的详细信息,请参见“每种模式的状态和法兰 LED 颜色”
- 可以通过远程控制设置打开/关闭机器人的电源
- 点按主菜单的设置按钮,然后在机器人设置下选择远程控制。
- 选择远程控制专用输入端口以使用开机或关机功能。