
名称和功能
操纵器
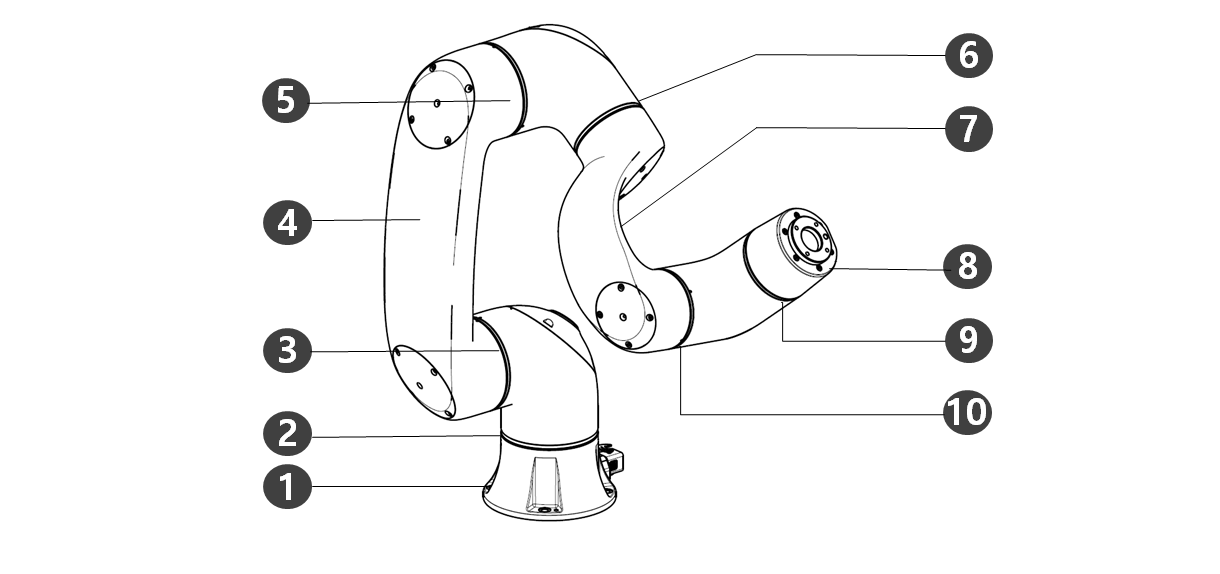
部件名称
编号 | 名称 | 编号 | 名称 |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Tool Flange |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
主要特性
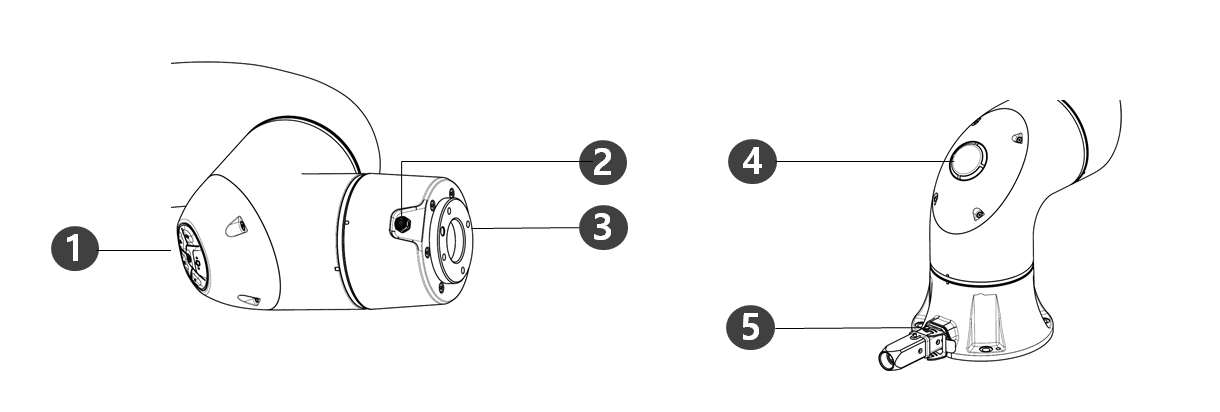
编号 | 项目 | 说明 |
|---|---|---|
1 | Cockpit | [选项]用于直接示教的控制器. |
| 2 | Flange I/O | 用于工具控制的 I/O 端口。 (数字输入 2 通道,输出 2 通道) |
3 | Tool flange | 安装工具的区域 |
4 | LED (1-axis) | 以不同的颜色显示机器人状态。有关机器人状态的更多信息,请参见“ 每种模式的状态和法兰 LED 颜色”。 |
5 | Connector | 用于向机器人供电和机器人的通信 |
控制器
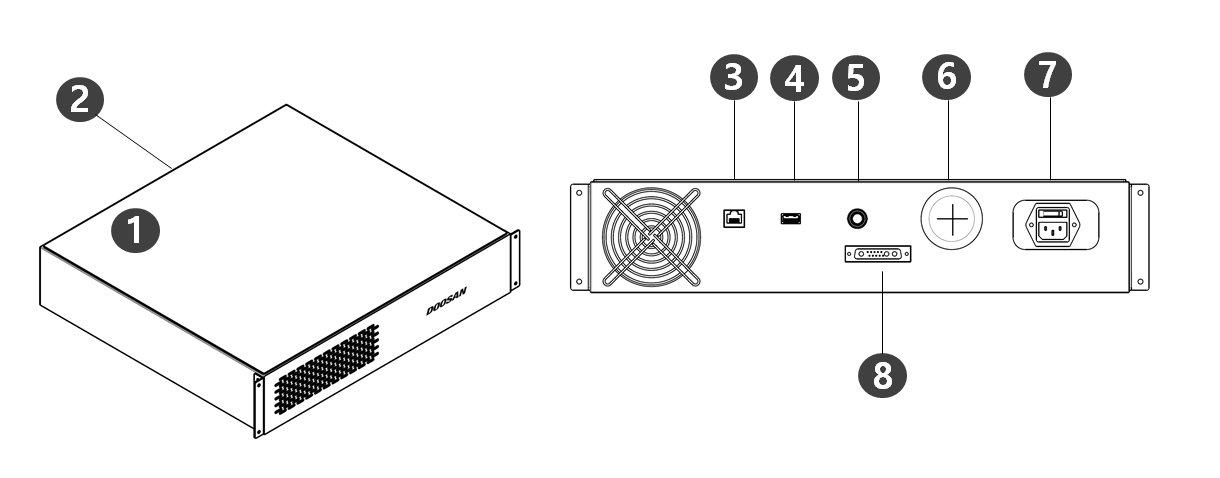
编号 | 项 | 说明 |
1 | I/O connection terminal (internal) | 无法连接其他机器人或周围设备的控制器。 |
2 | Emergency stop button and Smart Pendant connection terminal | 这会将紧急停止按钮或智能示教器电缆连接到控制器。 |
3 | Network connection terminal | 笔记本电脑、TCP/IP 设备、Modbus 设备和视觉传感器可连接到控制器内部的网络连接器端子。 |
4 | USB connection terminal | 机器人运行过程中产生的日志可以保存到U盘,也可以导出或导入任务。 |
5 | Emergency stop button and Smart Pendant connection terminal | 这会将紧急停止按钮或智能示教器电缆连接到控制器。 |
6 | External cable terminal | 可以连接外部设备的终端。 |
7 | Power connection terminal | 这将电源连接到控制器。 |
| 8 | Manipulator cable connection terminal | 这会将操纵器的电缆连接到控制器。 |
紧急停止按钮
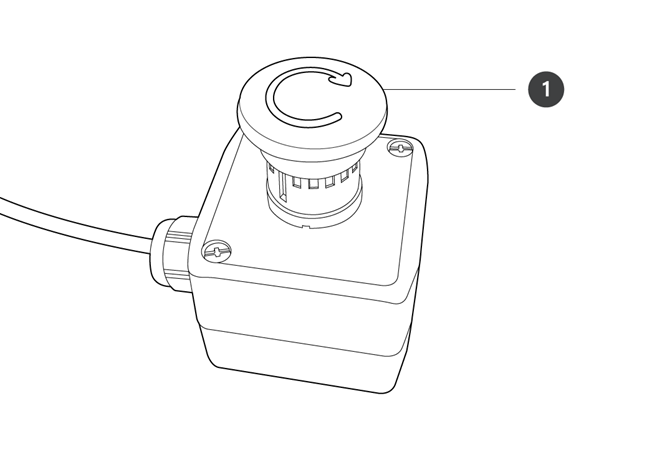
编号 | 项目 | 说明 |
|---|---|---|
1 | Emergency stop button | 如果发生紧急情况,请按此按钮停止机器人运行。 |
智能示教器
※ 智能示教器不属于标准产品,而是选配产品,因此必须单独购买
详细的产品功能请参考 附录. 智能示教器(A 系列).
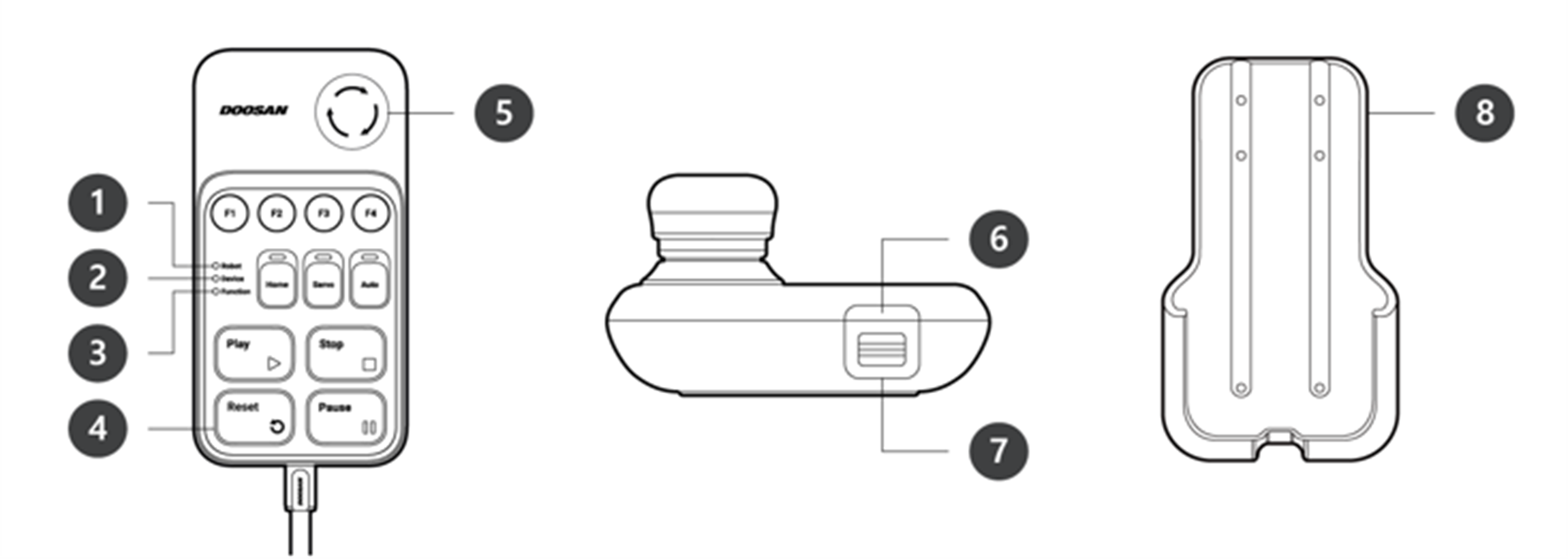
| 编号 | 项目 | 说明 |
|---|---|---|
1 | Robot LED | 通过向用户显示与机器人状态 LED 相同的颜色来指示机器人状态。 |
2 | Device LED | 用于指示系统是否进入智能示教器模式。 |
3 | Function LED | 按下四个输入信号按钮 (F1-F4) 点亮 LED,指示按下状态。 |
4 | Buttons | 共有 11 个按钮,包括 4 个用于返回原点、伺服、自动、播放、停止、恢复和暂停等各项功能的输入信号按钮 (F1-F4)。 |
5 | Emergency Stop Button | 如果发生紧急情况,请按此按钮使机器人停止运行。 |
6 | Power Button | 用于打开/关闭智能示教器的主电源。 |
7 | Strap Anchor | 用于为设备添加束带。 |
8 | Holder bracket | 在墙壁上安装支座托架,以放置智能示教器。 |
注
- 如果使用 SW V2.8 或更高版本,请将重置标签贴在智能手环上的恢复按钮上。
- 如果使用低于 SW V2.8 的版本,则不需要附加复位标签。在该版本中,Smart Pendant 中的恢复按钮用作恢复功能,而不是重置功能。
- 标签可能会在使用过程中脱落,请注意。