要基于机器人关节调整角度,请执行以下步骤:
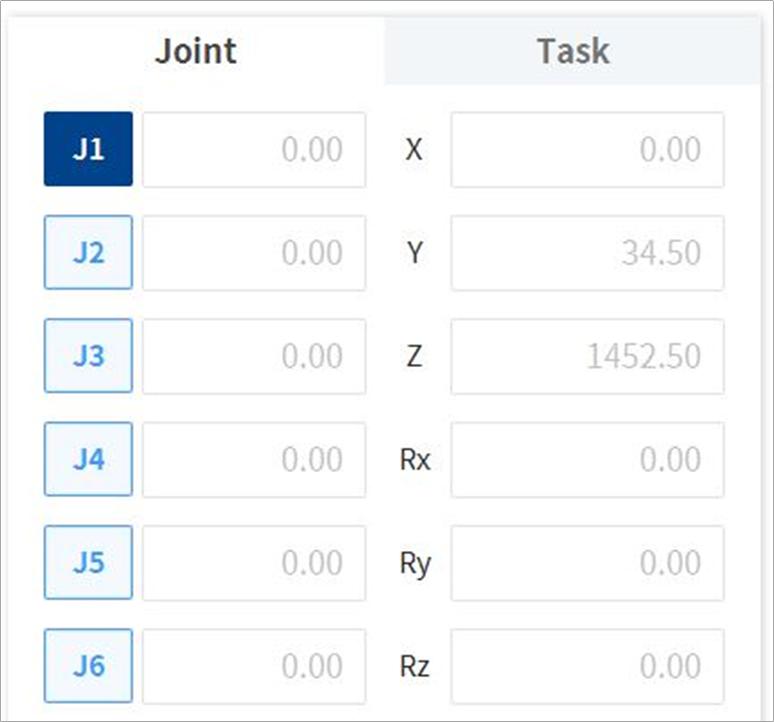
在 Joint(关节)屏幕中选择 Joint(关节)选项卡。
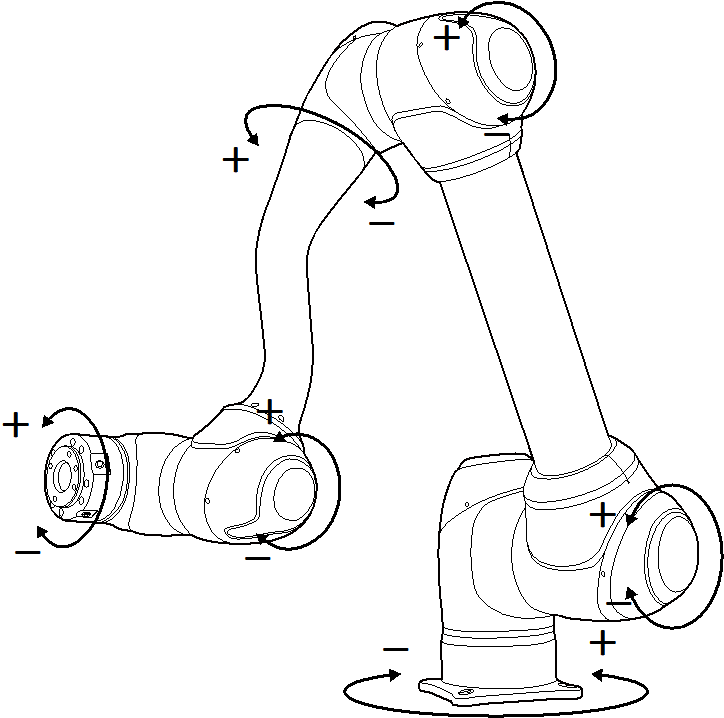
选择轴 (J1-J6) 以调整角度。
按住 Direction(方向)按钮(,)以调整对应轴的角度。
安全区域不适用于虚拟模式。
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.