
操作员干预功能
如果在机器人运行过程中出现问题或用户发出命令,机器人将停止运行并显示弹出消息,允许操作员进行干预并解决问题。用户解决问题后,任务将在出现问题的程序行上继续。
注意
要使用工人干预功能,您必须完成以下设置之一。
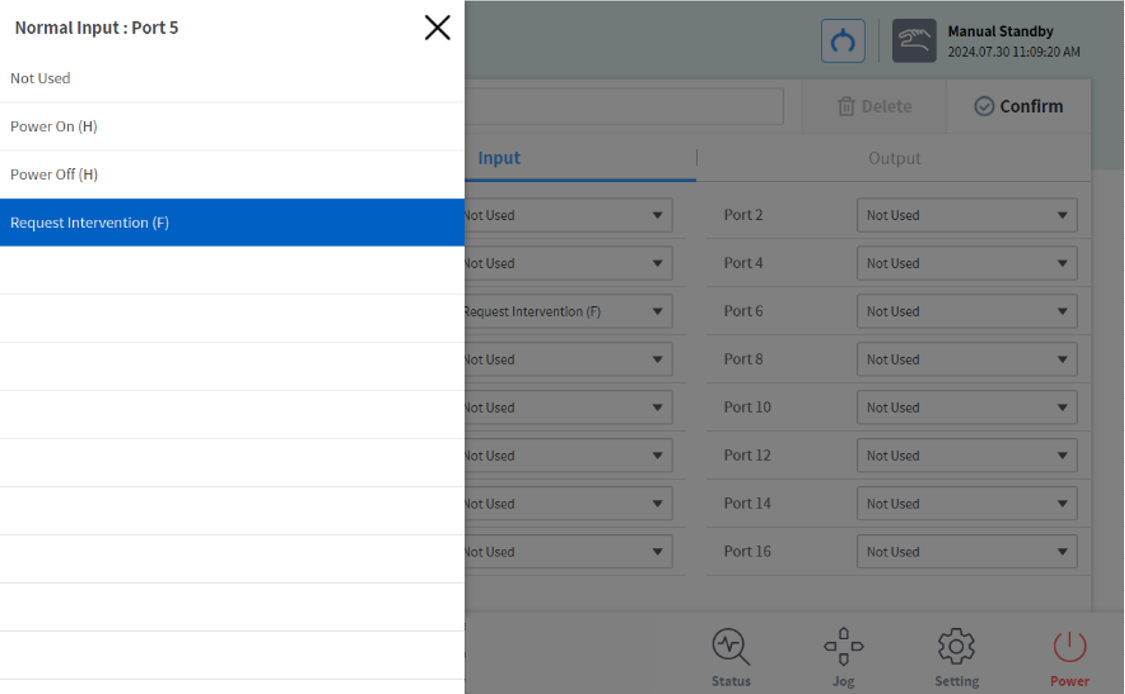
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(有关详细设置,请参阅 Welding Techinical Note。)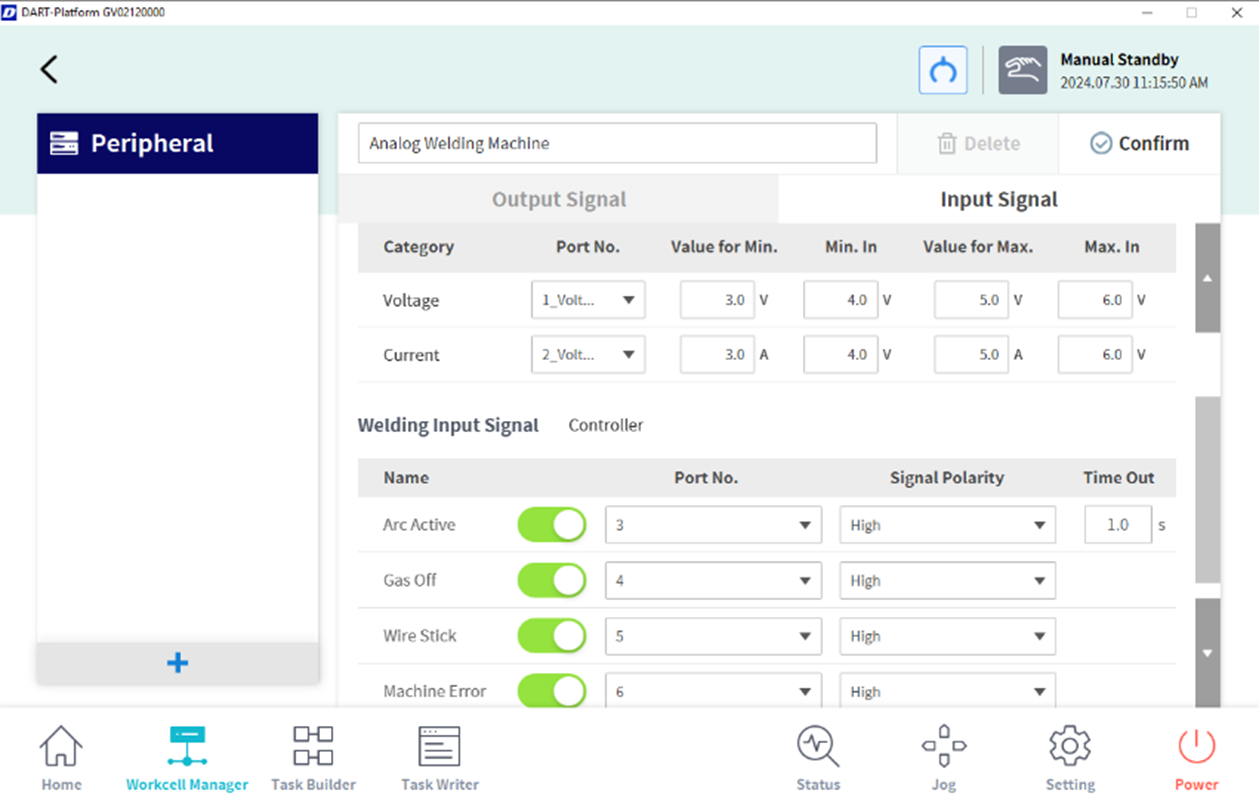
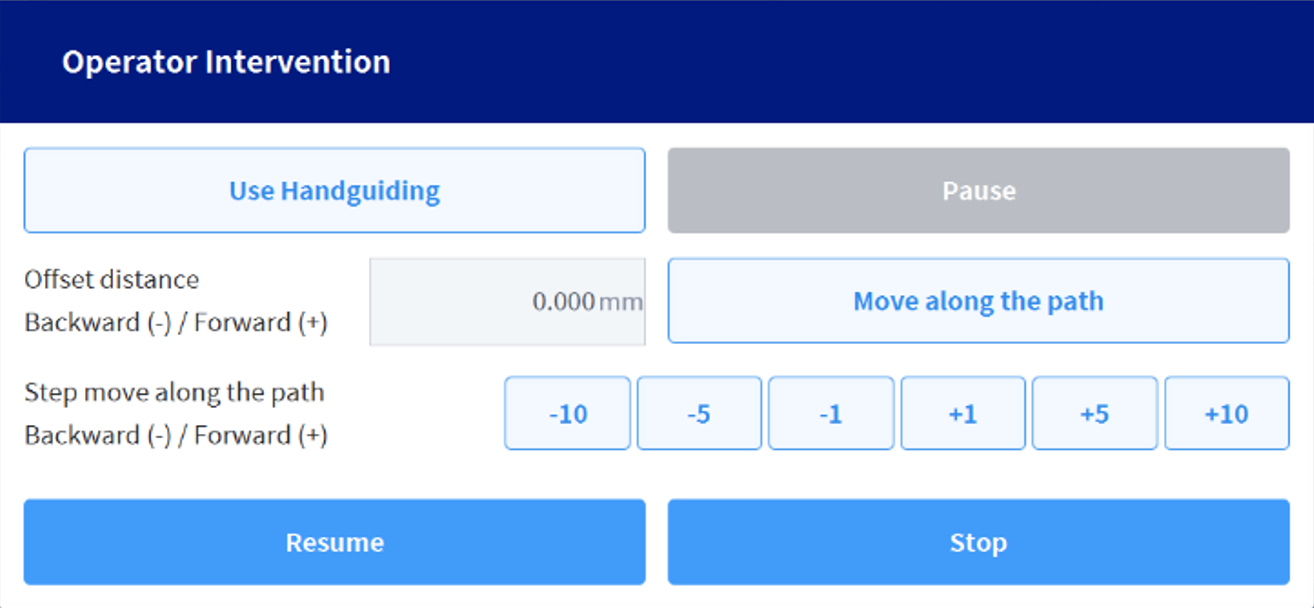
“沿路径移动按钮”和“步进移动按钮(-10、-5、-1、+1、+5、+10)”执行相同的操作。但是,前者从参考位置向前或向后移动手动输入的偏移量,而后者则以预设的步进偏移量为目标向前或向后移动一个点。使用上述按钮完成操作后,按下其他按钮将使当前位置移动偏移量。
“使用手导按钮”仅在设置协作区域时激活,机器人状态变为手导状态,允许在区域内进行直接示教。此后,您可以通过按下驾驶舱背面或示教器上的按钮来激活直接示教。
在手导模式下,“使用手导按钮”变为“结束手导按钮”。
按下“结束手导按钮”时,手导状态结束。此时,出于安全考虑,将当前机器人位置、角度和停止点(第一次弹出的时间)的值进行比较以生成弹出。如果出现以下内容的弹出,则必须再次直接示教以纠正机器人的位置和姿势并重试。
如果当前 TCP 位置与停止位置的 TCP 之间的直线距离相差超过 20 cm
如果当前关节角度与停止点的关节角度相差超过 1~3 轴(10 度)/4~5 轴(30 度)/6 轴(60 度)
此功能仅在 MoveL/MoveC/MoveB 操作期间支持。
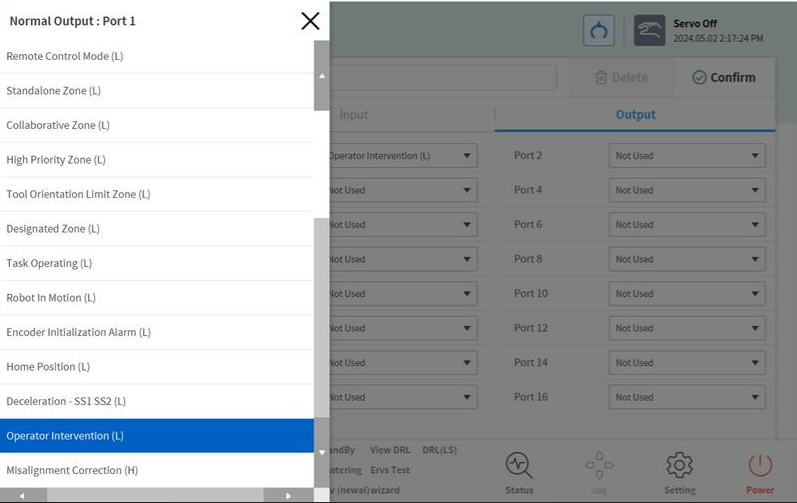
您可以使用正常输出功能来发出弹出信号。弹出发生时信号将保持活动状态,弹出结束时信号将停用。
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
以下是使用场景:
在程序运行时接收来自用户或连接设备的数字输入信号。
机器人暂停并出现操作员干预弹出窗口。
(如果使用直接教学)按使用手动引导按钮,然后按驾驶舱或教学挂件背面的按钮以激活直接教学。直接教学操作完成后,按结束手动引导按钮。
按“沿路径移动”按钮可沿路径移动机器人。
将机器人移动到所需的位置后,按“恢复”按钮可恢复机器人的任务并关闭弹出窗口。