空间限制和区域形状
空间限制/区域的形状的设置方式如下:
项 | 说明 |
|---|---|
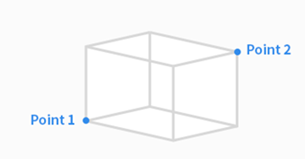
Cuboid | 空间限制/区域的形状设置为正立方体。
|
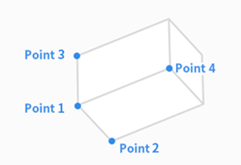
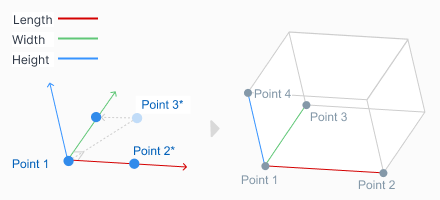
Tilted Cuboid | 空间限制/区域的形状设置为斜立方体。 4点设定
通过 3 点和高度进行设置 输入参考点(点 1)、x 轴上的点(点 2)和 xy 平面上的点(点 3)。 确定参考点和三个轴方向后,可以通过设置长、宽、高来指定倾斜长方体的大小。 通过设置 x、y 和 z 偏移,可以平行移动(平行平移)倾斜的长方体。
|
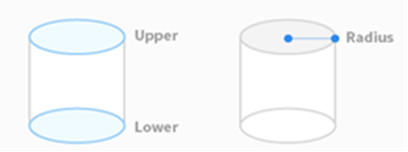
Cylinder | 空间限制/区域的形状设置为圆柱体。
|
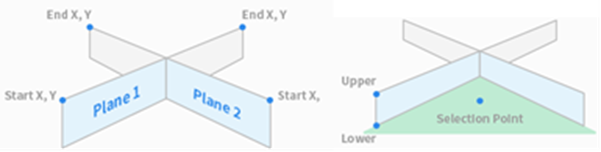
Multi-plane Box | 空间限制/区域的形状设置为多平面箱。
|
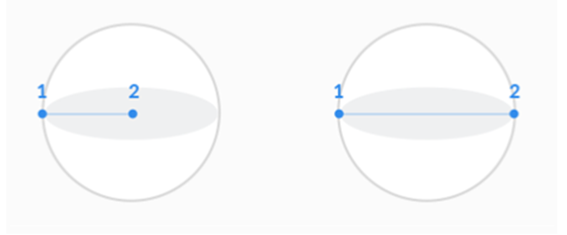
Sphere | 空间限制/区域的形状设置为球体。
|