了解机械手运动属性
必填 正常 15 分钟
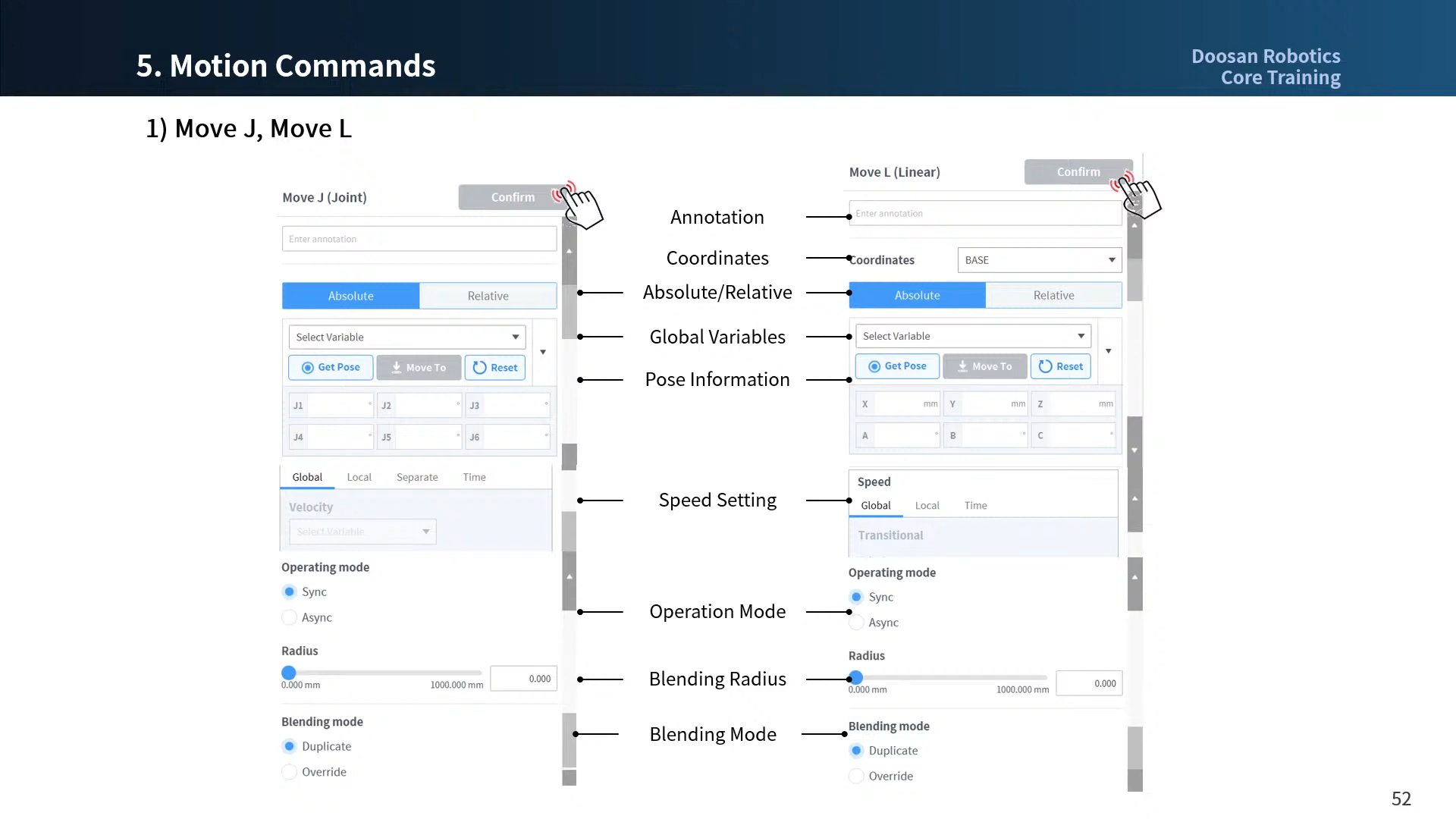
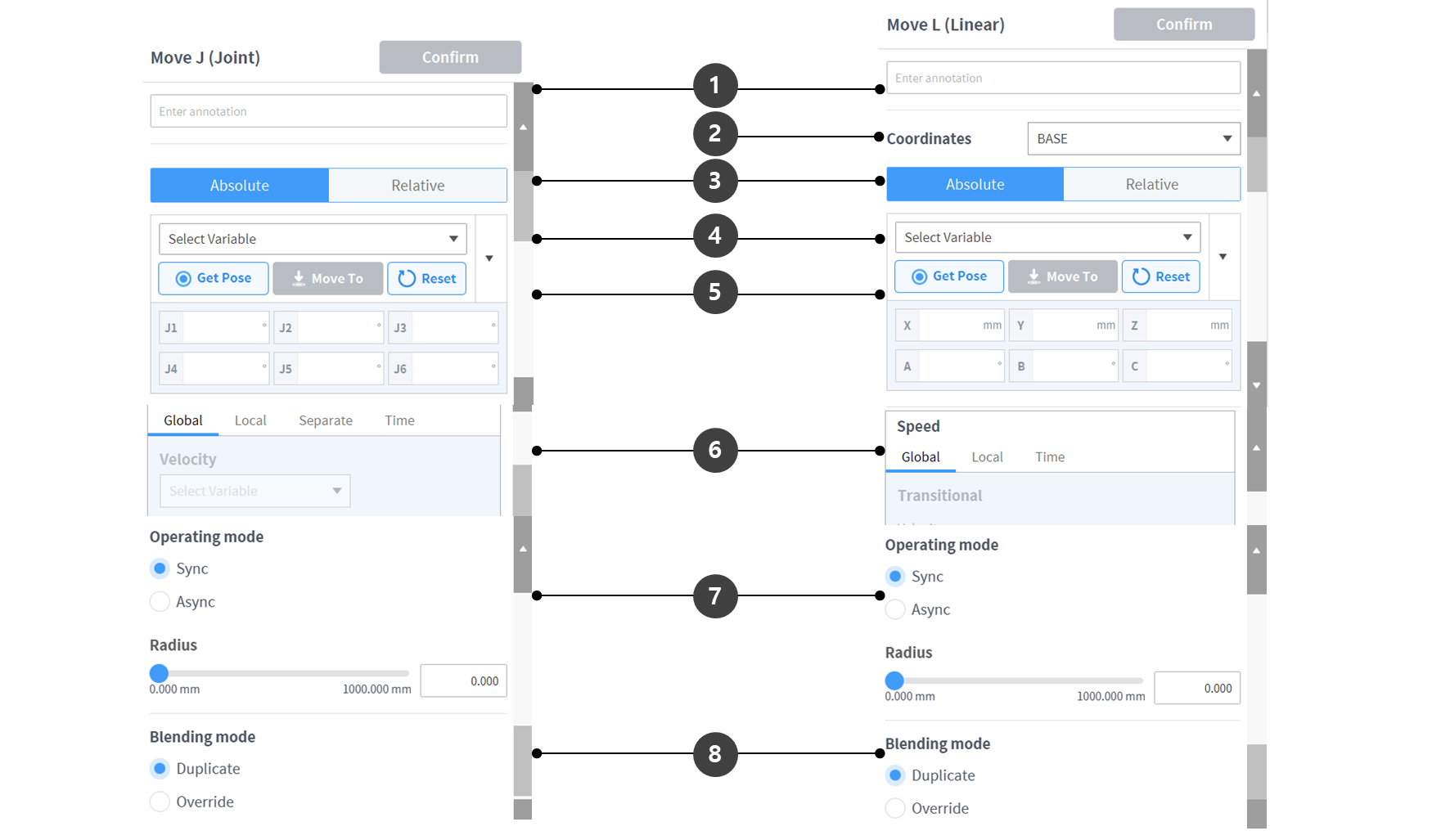
它是标准动作, MoveJ 和 MoveL 命令的属性屏幕。其他动作也具有类似的属性。
- 如果使用最小设置创建运动,则只需输入姿势信息 (下图中为 5)。
| 姓名 | 描述 | |
|---|---|---|
| 1. | 注释 | 可在任务窗口中找到的命令的说明或注释 |
| 2. | 坐标 |
|
| 3. | 选择移动类型 |
|
| 4. | 选择变量 | 可以选择将设置信息注册为变量 |
| 5. | 提交信息 | 输入姿势信息
|
| 6. | 速度设置 |
|
| 7. | 操作模式 |
|
| 8. | 混合模式 | 当半径设置为前一运动的选项时,用于确定是根据下一运动的混合模式忽略还是覆盖前一运动的选项 |
操作模式
同步
在执行中的命令完成后,您可以使用 Sync 移至下一个命令。它被设置为默认值,并在一般情况下使用。
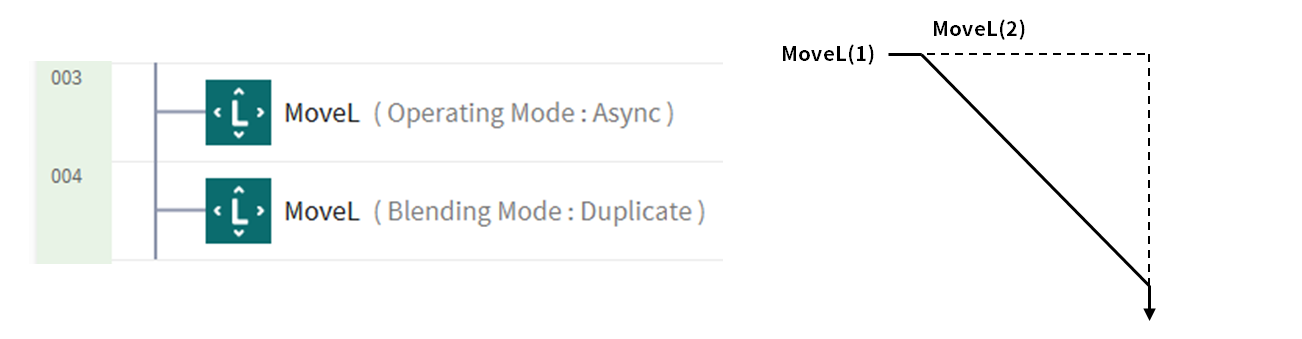
异步
当动作命令开始时, Async 将同时启动下一个命令。它用于平稳地连接不同的运动,当运动开始时同时打开 / 关闭信号输出时,也会使用它。
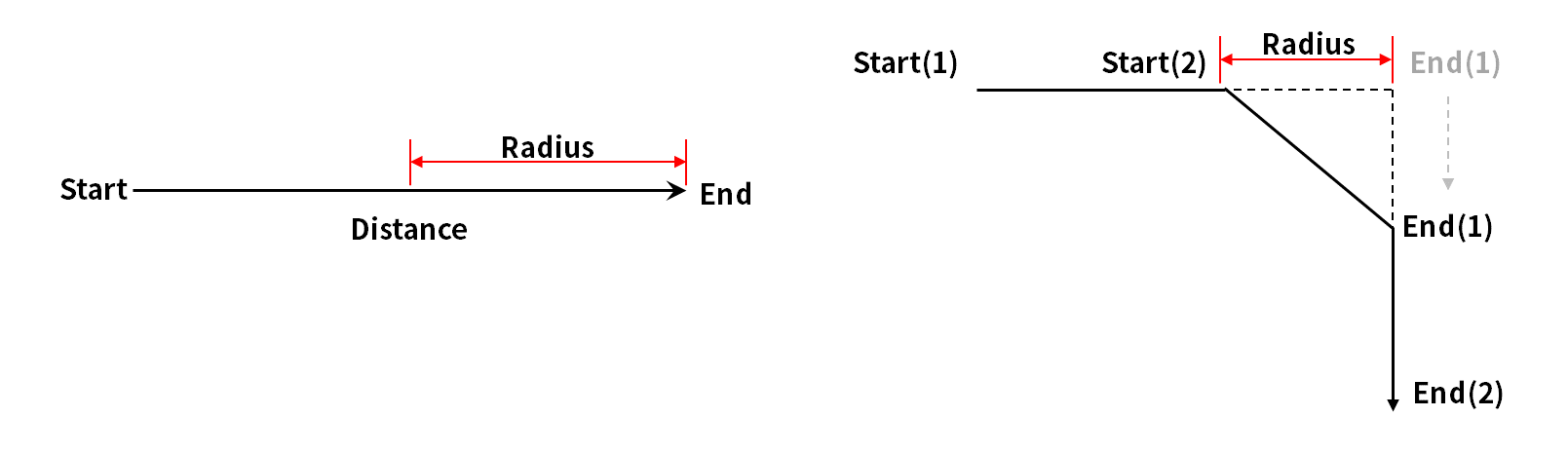
半径
RADIUS 选项在 MOTION 命令到达其目标点之前激活 RADIUS 部分中的异步功能。使用此选项,可以平稳连接到下一个运动命令,而不会停止当前的运动命令。默认情况下,半径设置为 0 毫米。
小心
RADIUS 选项具有以下特征和限制:
- RADIUS 函数只能在同步模式下使用。
- 条件和计算可以在半径内的异步部分执行。
- 在执行运动之前,半径不能超过当前位置和目标位置之间总距离的 1/2。
- 例如:如果移动距离为 100 mm ,则最大可用半径为 50 mm。
- 不能在动作之间应用混合的动作命令如下:这些命令中已经应用了混合,因此对这些命令应用 RADIUS 并执行它们会导致错误。使用 WaitMotion 和 StopMotion 等命令有助于避免错误。
- MoveSX , MoveSJ , MovePeriodic , MoveSpiral , MoveB
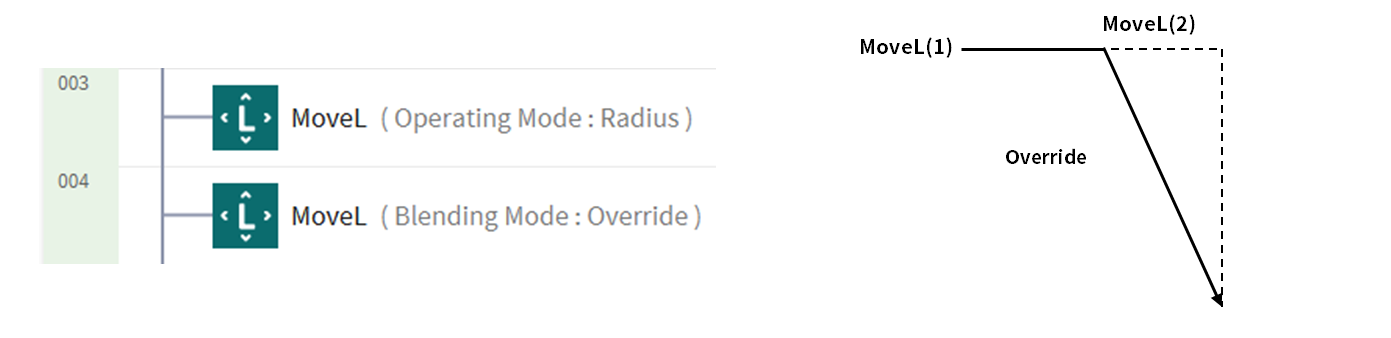
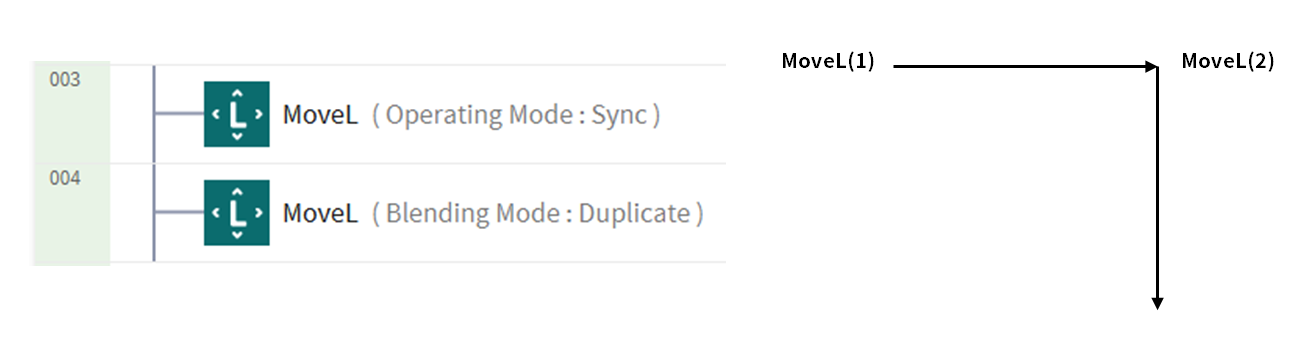
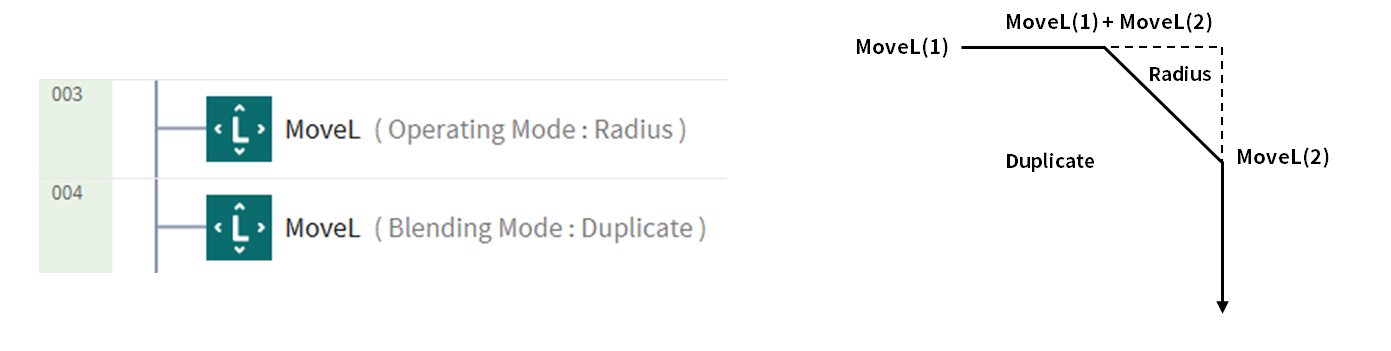
混合模式
当半径设置为前一运动的选项时,该选项用于确定是根据下一运动的混合模式忽略还是覆盖前一运动。
重复
复制是一种模式,用于保持前一个运动,以允许下一个运动与前一个运动重叠。
覆盖
覆盖忽略并覆盖前一个运动以执行以下运动。