系统启动
系统通电后,系统将启动。启动完成后,系统应用程序将显示在示教器上。有关系统应用程序的更多信息,请参见“ 程序画面配置”。
如果是 DART 平台(适用于 Windows),
- 运行安装在台式机或笔记本电脑上的 DART 平台。
- 等待约 5 分钟,让机器人控制器完成启动。
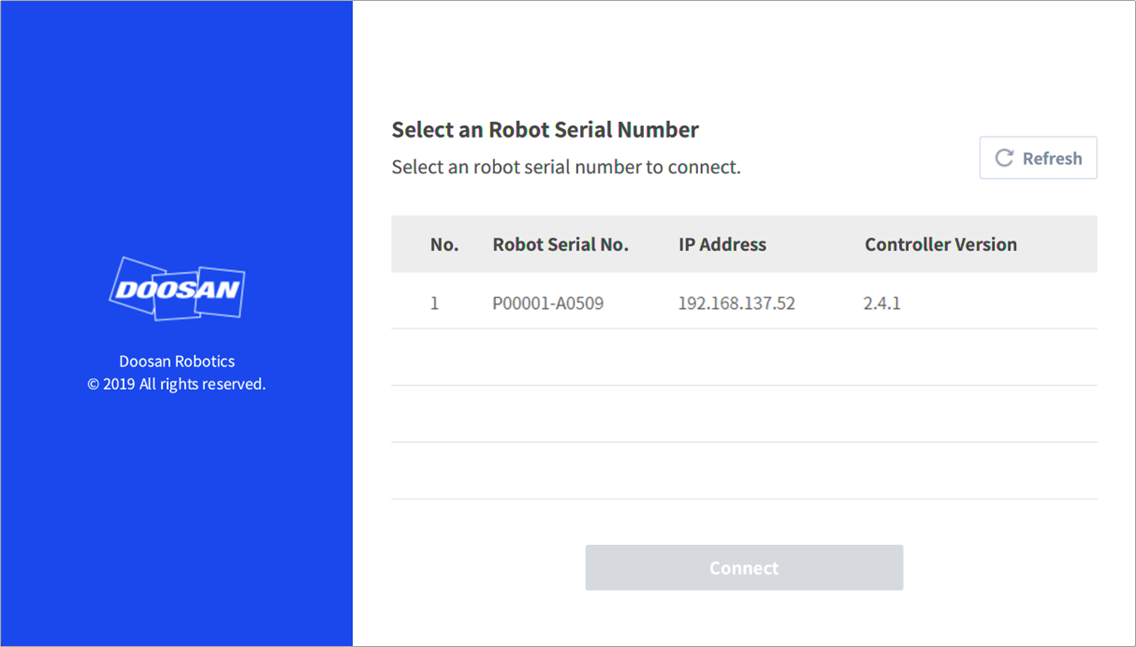
- 搜索IP时,查看连接到网络的序列号。
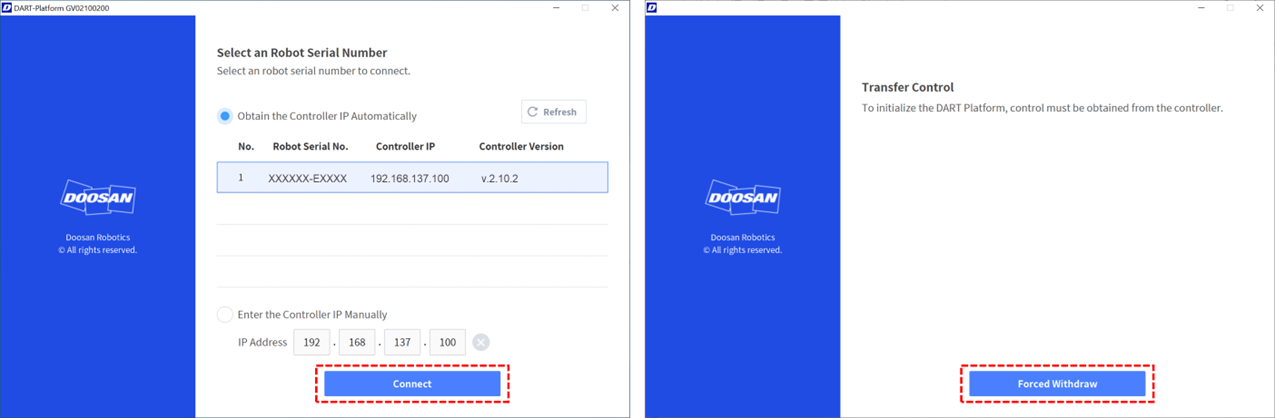
- 选择您要连接的机器人,然后单击“连接”按钮。
- 按 Force Recall 按钮转移控制权。
注
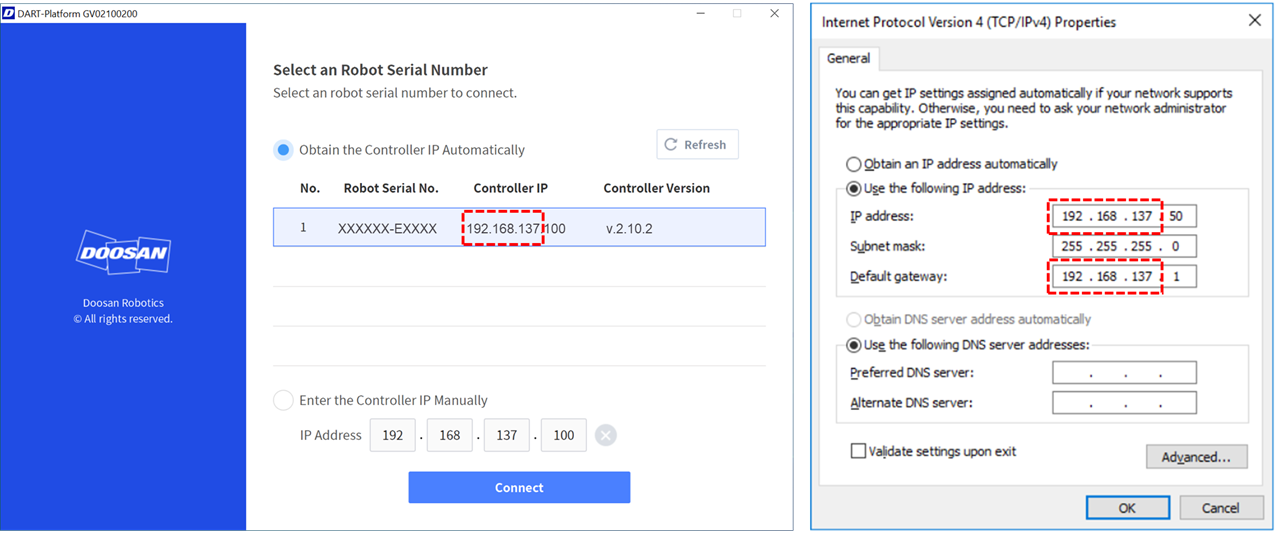
如果控制器和DART-Platform之间没有连接,将安装了DART-Platform的台式机或笔记本电脑的IP地址的C类段和默认网关更改为控制器IP地址的C类段,然后重试。
如果未搜索到 IP,请选择“手动输入控制器 IP”并继续连接。 控制器的默认 IP 地址设置为 192.168.137.100。
如果控件的 Forced Withdraw 仍然失败,请检查以下内容:
关闭程序并重新启动。
确保未按下紧急停止按钮。
如果控制器的一对或多对数字输入被指定为安全 I/O 设置中的紧急停止/远程紧急停止/STO 信号(低电平有效),确保所有指定的信号被禁用( 高的)。
检查控制器是否启动完成。
检查机器人状态。 在 Remote Control、Recovery 或 Backdrive 的情况下,运行 DART 平台可能会失败。