空间限制和区域形状
空间限制/区域的形状的设置方式如下:
项 | 说明 |
|---|---|
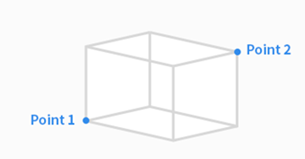
Cuboid | 空间限制/区域的形状设置为正立方体。
|
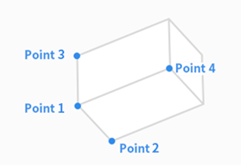
Tilted Cuboid | 空间限制/区域的形状设置为斜立方体。
|
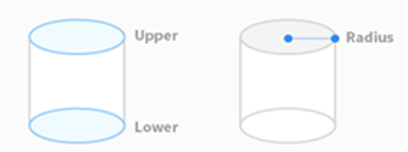
Cylinder | 空间限制/区域的形状设置为圆柱体。
|
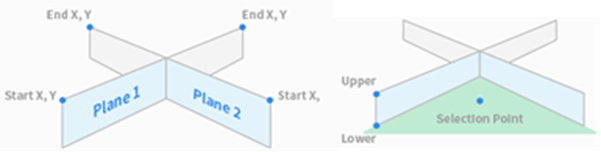
Multi-plane Box | 空间限制/区域的形状设置为多平面箱。
|
Sphere | 空间限制/区域的形状设置为球体。
|
空间限制/区域的形状的设置方式如下:
项 | 说明 |
|---|---|
Cuboid | 空间限制/区域的形状设置为正立方体。
|
Tilted Cuboid | 空间限制/区域的形状设置为斜立方体。
|
Cylinder | 空间限制/区域的形状设置为圆柱体。
|
Multi-plane Box | 空间限制/区域的形状设置为多平面箱。
|
Sphere | 空间限制/区域的形状设置为球体。
|