
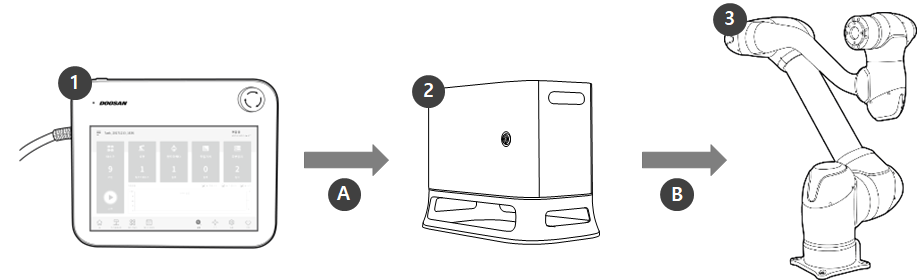
系统配置
| 编号 | 项目 | 说明 |
|---|---|---|
| 1 | 示教器 | 该设备用于管理整个系统,并且能够向机器人示教特定位姿以及进行操纵器和控制器相关设置。 |
| 2 | 控制器 | 用于根据示教器设置的位姿或运动控制机器人的运动。控制器具备各种 I/O 端口,可连接和使用各种设备和装置。 |
| 3 | 操纵器 | 一种工业协作机器人,可以使用各种工具执行运输或组装任务。 |
| A | 命令/ 监视 | |
| B | 电源/ 网络 |
注
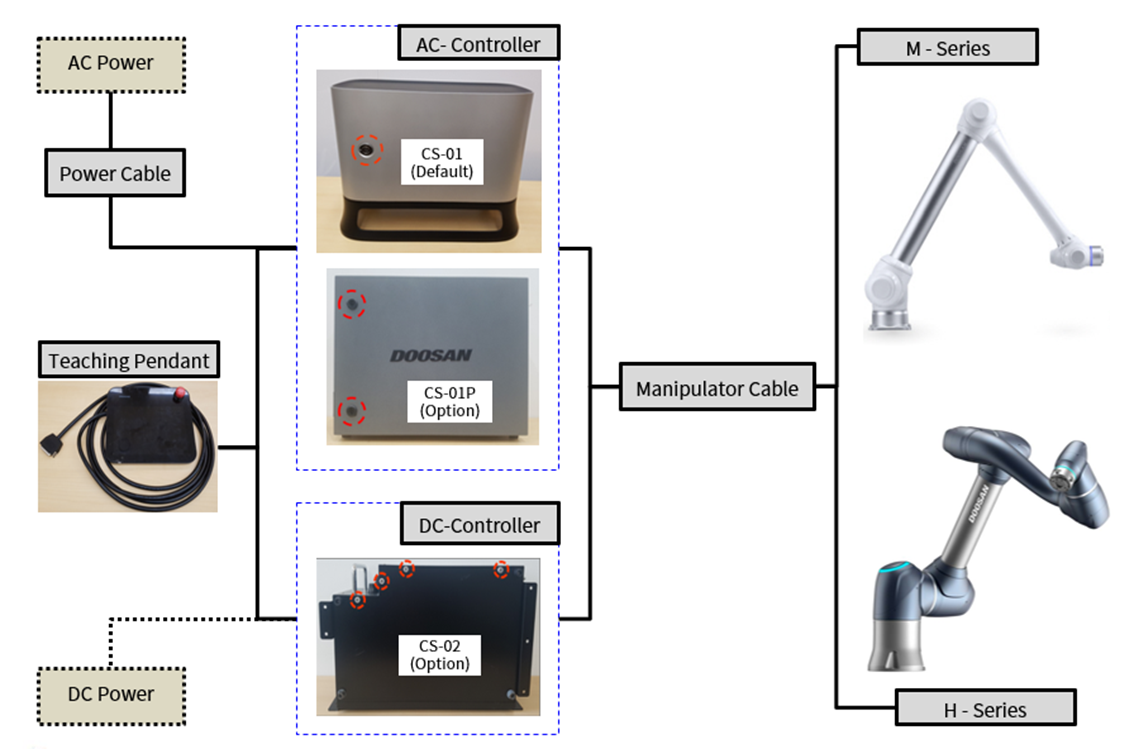
- 请参见下面的 M 系列和 H 系列机器人的系统配置。
| 编号 | 项目 | 说明 |
|---|---|---|
| 1 | 示教器 | 该设备用于管理整个系统,并且能够向机器人示教特定位姿以及进行操纵器和控制器相关设置。 |
| 2 | 控制器 | 用于根据示教器设置的位姿或运动控制机器人的运动。控制器具备各种 I/O 端口,可连接和使用各种设备和装置。 |
| 3 | 操纵器 | 一种工业协作机器人,可以使用各种工具执行运输或组装任务。 |
| A | 命令/ 监视 | |
| B | 电源/ 网络 |
注