
任务编辑器命令的合规性/强制控制概念概述
力控制和合规控制是控制机械手力的功能。此外,通过添加运动命令,可以在进行运动的同时控制力。合规性控制和部队控制分别有以下区别。
合规性控制
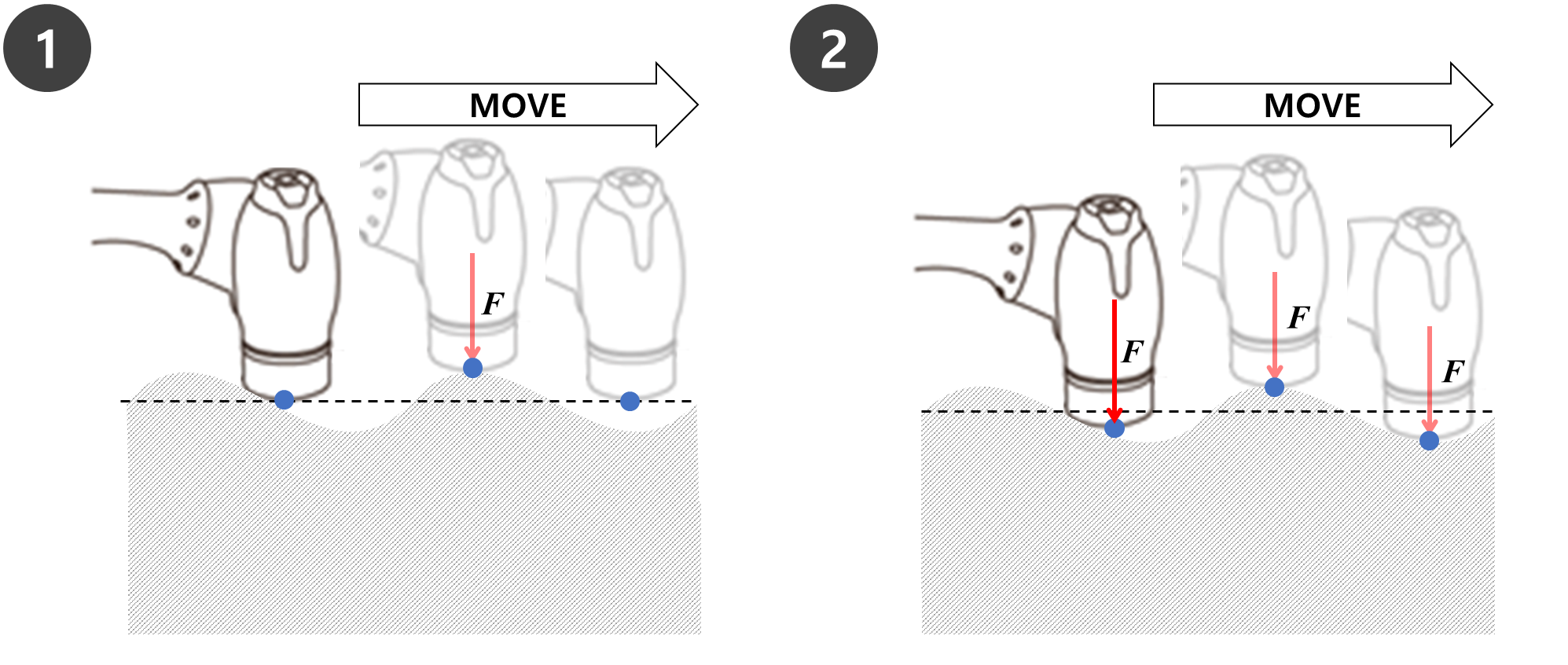
在合规性控制的情况下,机器人在机器人TCP末端服从外力,当外力被消除时,会产生将机器人移回原来的位置的力。
当机器人在崎岖不平的表面上沿直线移动,并且您希望确保机器人移动而不会对自身或表面造成损坏时,可以使用这种方法。这也可用于防止工件附近发生意外碰撞。
力控制
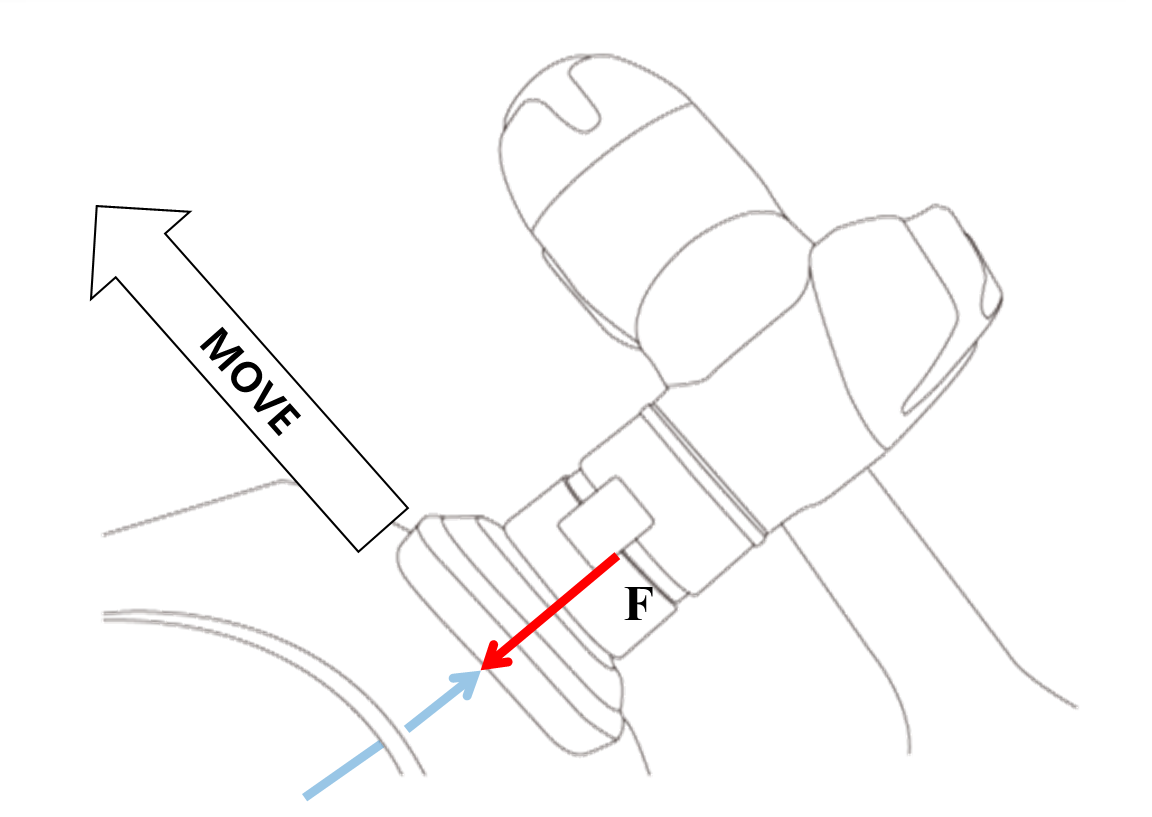
在力控制的情况下,力施加在机器人末端的TCP上。加速度是在产生力的方向上产生的,这会导致机器人在运动方向上同时沿力的方向移动。
当机器人与物体接触时,会对物体施加力,直到设定的力和物体的排斥力处于平衡状态
当机器人在崎岖不平的表面上沿直线移动,并且您希望确保向表面上施加恒定的力时,可以使用这种方法。这也可用于需要机器人以恒定力推动的任务,例如抛光工作。
注意
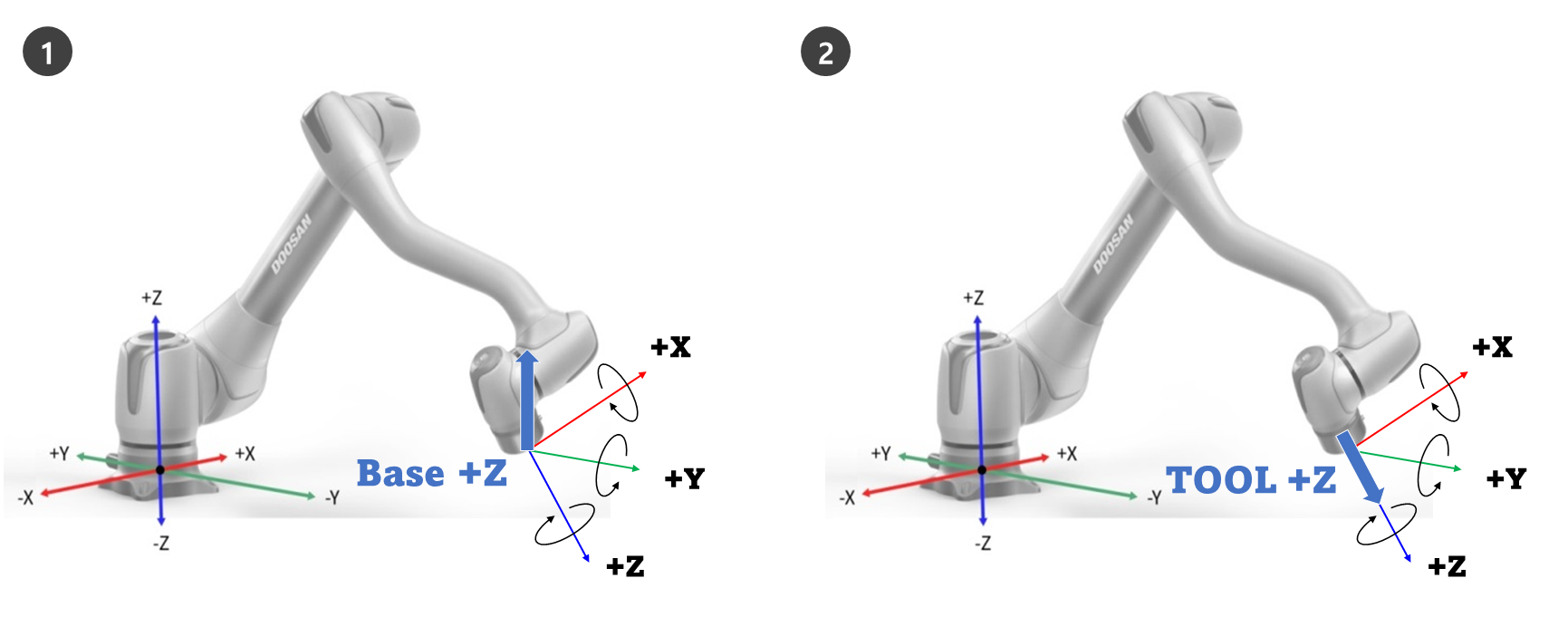
合规性和强制命令是根据当前坐标执行的。任务的默认坐标是基准坐标,可使用set命令更改坐标。
图 1是在基准坐标上施加+Z方向的力/顺应性控制时的操作方向。
图 2是在刀具坐标上施加+Z方向的力/顺应性控制时的操作方向。
合规性控制
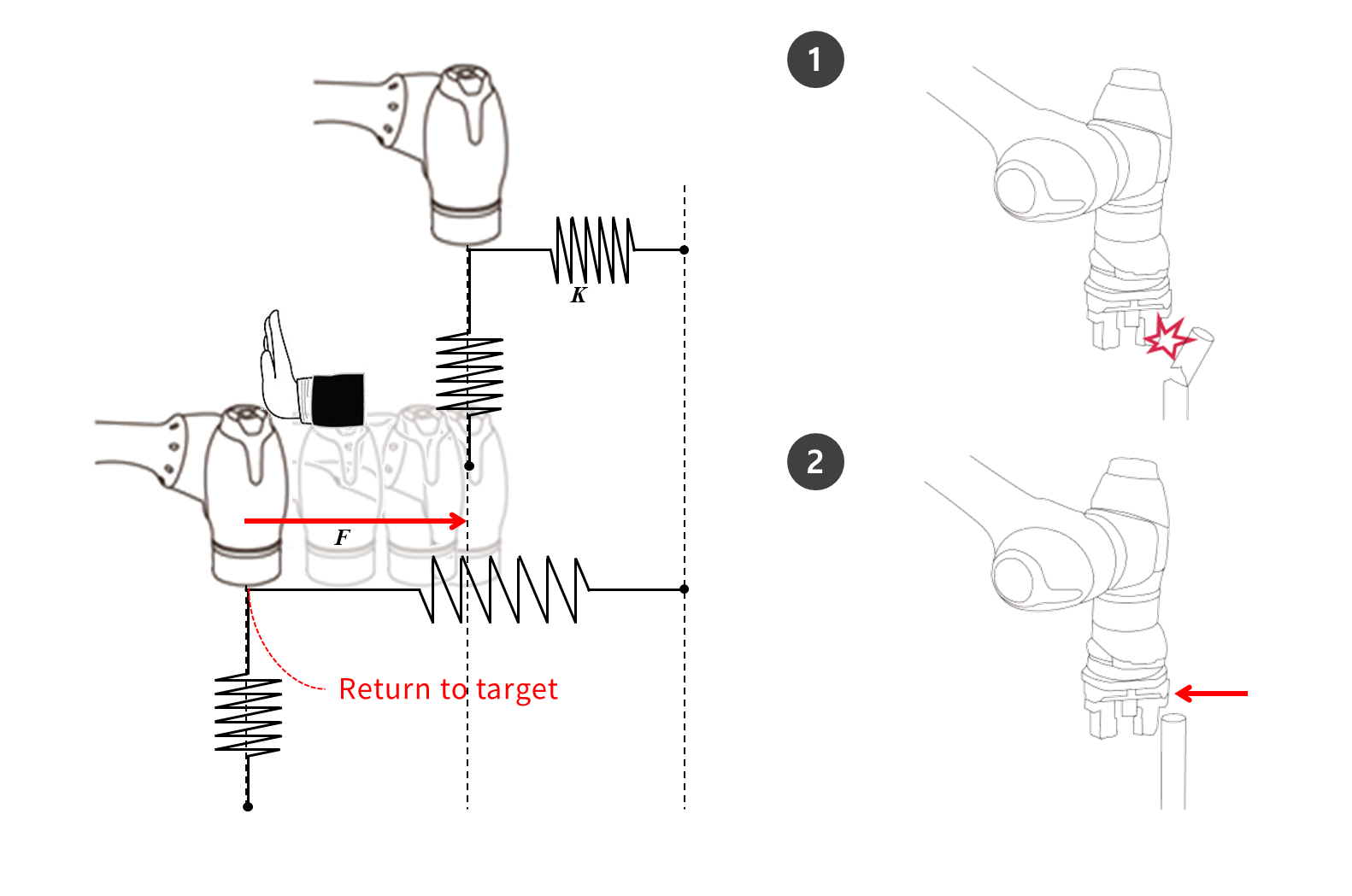
顺应性控制是在机械手末端对TCOP施加力时根据设定刚度顺应外力的功能。它在目标点平衡力,并且这是一种控制方法,在偏离平衡点时产生排斥力。在合规性控制过程中,机械手端部会像弹簧一样弹起。
如果在单独使用运动控制时发生碰撞,则可能会损坏碰撞物体。
斗山机器人在发生碰撞时安全停止,但根据用户设置(如 安全限制>碰撞灵敏度),可能会发生以下情况。
如果在运动控制期间顺应控制设置为ON (开),机械手将在顺应碰撞物体的同时移动。
如果F为外力,K为刚度,X为距离,则以下公式为true。
F = K * X
K = F / X
X = F / K
根据上述公式,如果顺应控制的刚度设置为1000N/m,并且机器人移动1 mm,则产生的外部力为1N。
F=1000 N/m*0.001 m=1 N (0.001 m=1 mm)
注意
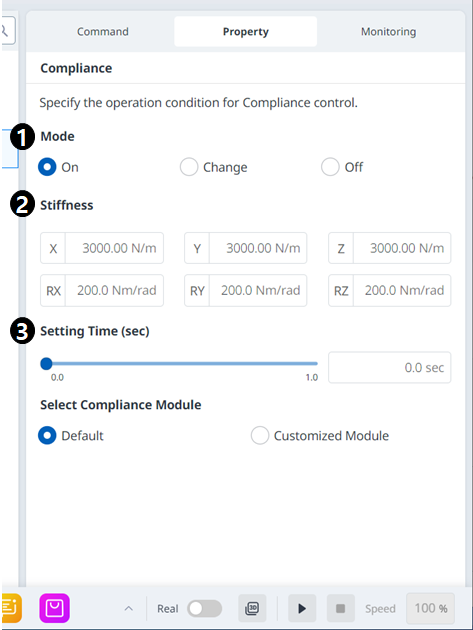
在Compliance Command的属性上,可以设置以下值:
模式
开:启用合规性控制
更改:如果顺应模式设置为开,则将更改为刚度
关:禁用合规性控制
刚度范围
M/H系列:平移(0~20000N/m),旋转(0~1000Nm/rad)
A系列:平移(0~10000N/m),旋转(0~300Nm/rad)
刚度值越低,对外力的响应就越温和,并且需要更多的时间才能返回目标点
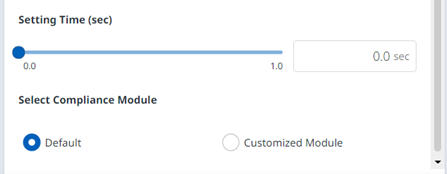
设置时间
这是当前刚度值达到设定刚度值所需的时间(0-1s)
小心
必须准确设置刀具重量和TCP (刀具中心点)。不准确的刀具重量可能导致机械手将刀具重量检测为外力,将合规命令设置为ON将产生位置误差。
紧身套件的张力可能会对机械手产生外部扭矩。因此,在安装着装包时要小心。
执行异步运动或混合运动时,不能打开或关闭合规性。
在合规命令打开期间,仅允许线性运动。不允许MoveJ和MoveSJ等关节动作。
在合规命令打开期间,无法更改工具重量或TCP。
在合规命令打开期间,由于运动执行期间产生的扭矩符合合规性,可能无法准确到达目标点。因此,建议在目标点附近打开合规性控制。或者,可以通过设置较大的刚度值来最小化位置误差。
力控制
力控制是在力控制方向施加力直到设定力和排斥力平衡的函数
它以设定的力方向移动机器人,如果与物体接触,则保持输入力(N)
它能够在施加恒定力的情况下在与力方向不同的方向上进行运动控制
最小设置为+/- 10N,可使用0.2N的分辨率进行微调
力控制在奇点区域中不可用
n一般情况下,合规性控制与力控制配合使用,以便力控制顺应外力
注意
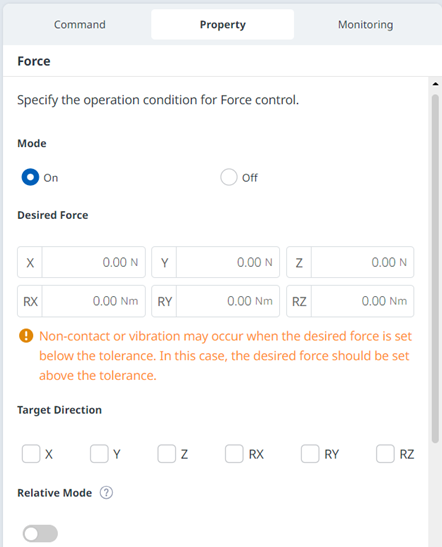
可以从Force Command的属性中设置以下值。
模式
开:启用力控制
关:禁用力控制
所需的力范围
X,Y,Z:10 -(每个机器人的最大值) N
A,B,C:5 -(每个机器人的最大值) Nm
有关最大力的更多信息,请参阅 安全参数的上下阈值范围和默认值。
目标方向
它移动到每个方向的选定目标值。
可以进行多个选择。
力控制只能在力设置后用方向设置来执行。
如果多个所选方向中的一个达到目标力,它将继续移动,直到达到另一个方向的目标值。
相对模式
如果启用此模式,它会将施加在机械手上的外力校准为0,以提高力控制精度。
当相对模式被禁用时,施加在目标上的实际力等于设定力和外部力的总和。
启用相对模式时,施加在目标上的实际力等于设定的力。
在力控制过程中,可能会因姿势或外力而发生偏差。
在力控制过程中,可能无法到达精确的目标点。因此,建议在目标点附近启用力控制。
设置时间
这是当前力值达到设定力值所需的时间(0-1秒)
线程命令
可以在任务编辑器中创建和执行线程。
注意
线程的约束如下所示:
线程名称不能以数字开头,只能包含小写字母,数字和下划线。名称不得超过30个字符,或者与另一个线程名称重复。
在任务编辑器屏幕中,单击"线程"命令时,"线程"命令和"结束线程"命令都将添加到任务列表面板中。每个任务最多允许四个线程。
以下命令不能单独配置,必须在条件语句中实现:
移动,移动L,移动J,移动SX,移动SJ,移动C, 移动B,移动螺旋,移动周期,移动JX
定义,设置,子,线程,断开, 重量计量
强制控制命令(合规性,强制)
信号命令(添加信号,设置信号,获取信号,删除信号)
高级命令(手动导轨,微移)
用户命令