
JOG Plus模块
用户可以从转动选项卡中选择手动移动方法。
点动:它将机械手接头或TCP移动到用户选择的接头轴或坐标轴上
移动:它将机械手接头或TCP移动到用户输入的目标点
机械手运动包括两种类型。
关节运动:它以旋转运动线性移动每个接头
任务运动:它将终点线性移动到目标点
以下是如何通过点动屏幕上的接合运动移动机械手的方法:

选择接合选项卡。
选择要移动的轴。例如,您可以选择J1。
按下+/-按钮移动机械手。按下+/-按钮时,机械手移动,当前位置实时显示在屏幕上。
以下是如何使用点动屏幕上的任务运动来移动机械手的方法:
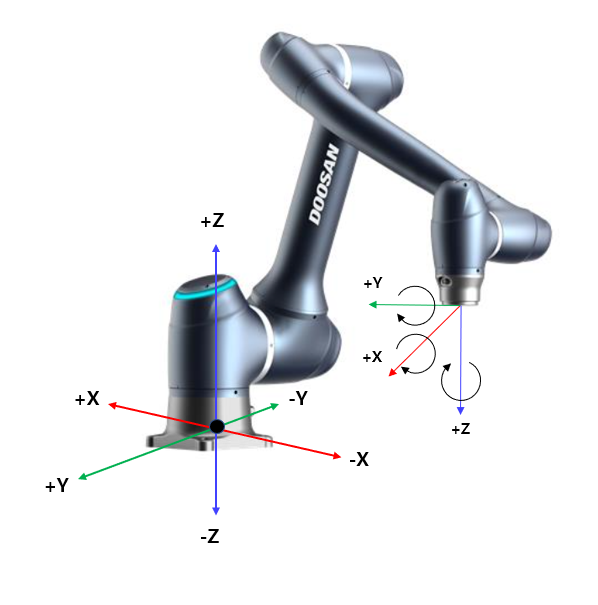
选择基体坐标。可以根据基准坐标或刀具坐标移动机械手。
选择要移动的方向。例如,可以选择X轴。
按下+/-按钮移动机械手。按下+/-按钮时,机械手移动,当前位置实时显示在屏幕上。
有关转折移动,移动和对齐的更多信息,请 点动面板 移动面板 分别参阅转折面板和移动面板。
注意
如果转动屏幕左上方实际模式的切换开关关闭,机械手仅在转动屏幕左侧的虚拟屏幕上移动。如果打开实际模式切换开关,实际机械手就会移动。
使用 Jog Plus 模块,用户可以在手动模式下浏览整个工作空间,或将操作空间设置为机械手操作空间。每个轴的移动角度可根据安全设置的选定操作空间和接头角度限制进行限制。
要使用Jog Plus功能,请轻触 主菜单上的Jog Plus模块。
伺服关闭期间不能使用点动功能。
机械手在 Jog Plus 屏幕中手动操作,因此机械手仅在按下Jog按钮时移动。
可以根据 Jog Plus Tab屏幕上的当前位置移动机械手。
可以通过在 Move (移动 )选项卡屏幕上配置目标角度/坐标来移动机械手。
可以在 Jog Plus Tab屏幕上配置参考坐标,并 将移动Tab屏幕作为连接或任务进行配置。
注意
如果由于机械手位于 Jog Plus 模式的操作空间以外的空间而无法导航,请将机械手操作空间设置为"None"(无)以允许对机械手进行导航。
注意
此模块在自动模式下不可用。点击右下角的切换按钮可使其在手动模式下可用。
使用Job Plus (Jog+),您可以在执行不同工作时同时使用点动功能。在教学过程中,当需要手动控制以将机械手移至目标点时,可以使用此功能。