
直流控制器(CS-12P)
产品简介(CS-12P)
每个部件和功能的名称
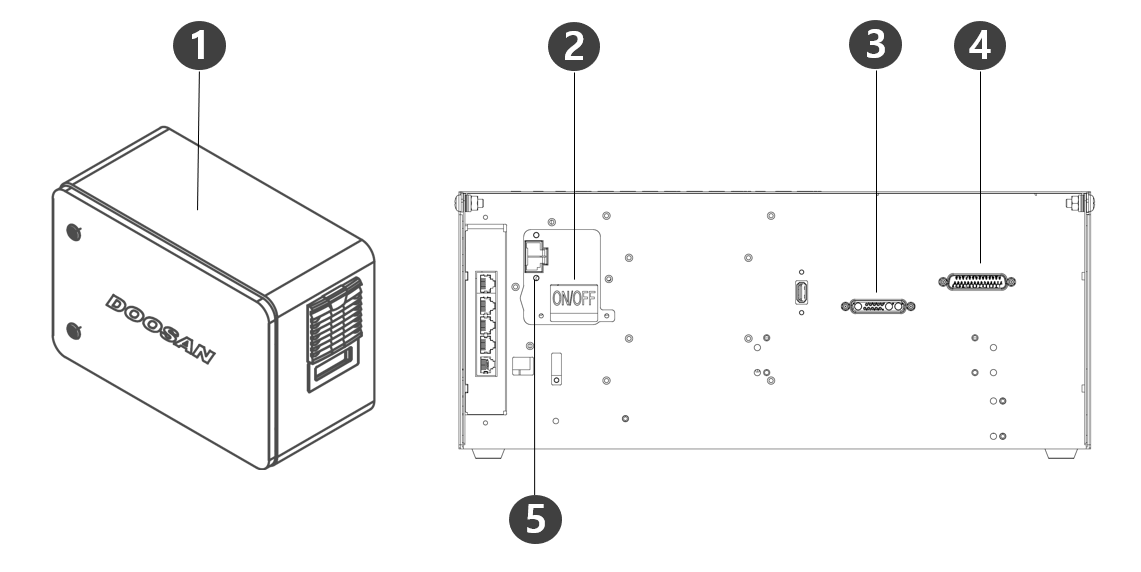
No. | 项目 | 说明 |
1 | I/O连接终端(内部) | 它可以与其他机器人的控制器或外围设备连接。 |
2 | 电源开关 | 用于打开/关闭控制器的主电源。 |
3 | 教学手控盒电缆连接端子 | 用于将示教手控盒电缆连接到控制器。 |
4 | 机械手电缆连接端子 | 用于将机械手电缆连接至控制器。 |
5 | 电源连接端子 | 用于连接控制器电源。 |
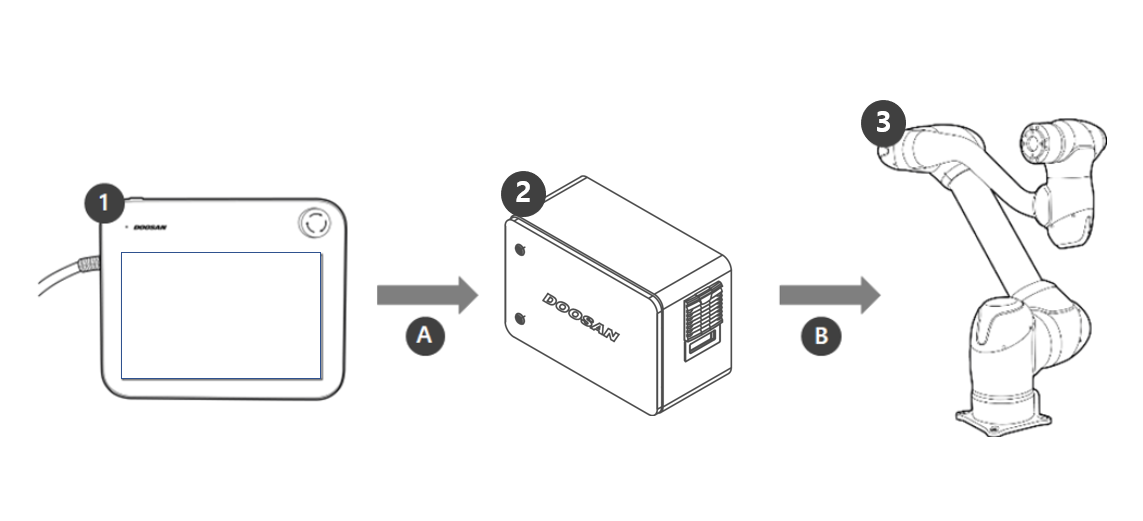
系统配置
No. | 名称 | 说明 |
|---|---|---|
1 | 教学手控盒 | 该设备管理整个系统,能够教授机器人特定的姿势或进行与机械手和控制器相关的设置。 |
2 | 控制器 | 它根据教学手控盒设定的姿势或移动来控制机器人的移动。它具有各种I/O端口,允许连接和使用各种设备和设备。 |
3 | 操纵杆 | 它是一种工业协作机器人,可以使用各种工具执行运输或装配任务。 |
a | 命令/监控 | |
b | 电源/网络 |
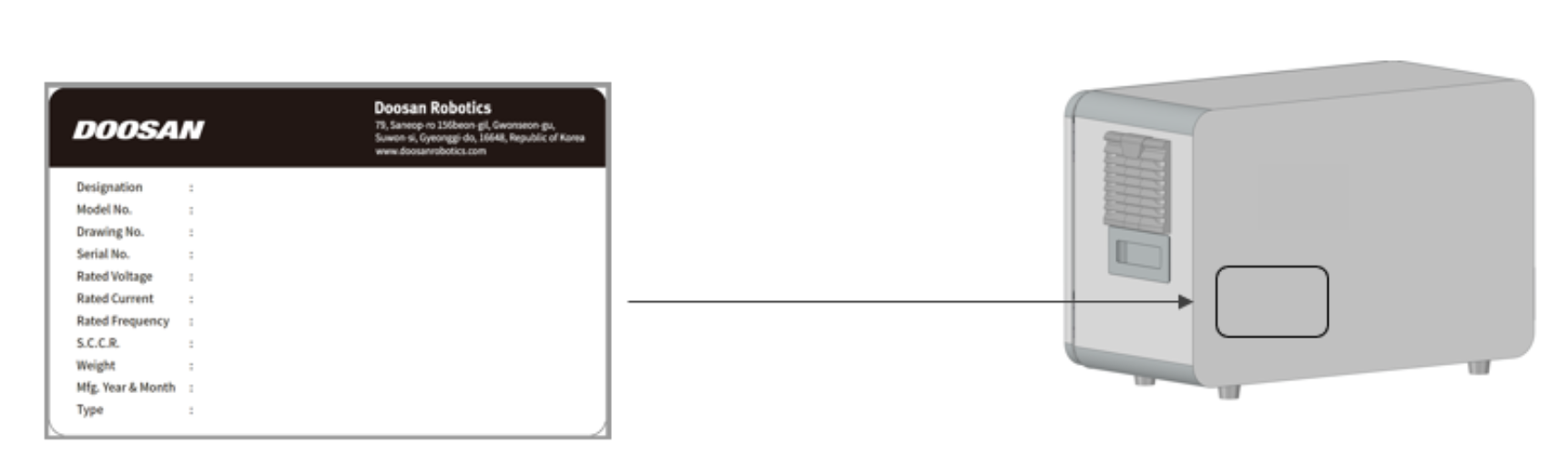
铭牌和标签
安装(CS-12P)
安装过程中的注意事项
小心
安装控制器之前,请确保足够的空间。如果没有足够的空间,控制器可能会损坏,或者机械手或教学手控盒电缆可能存在缺陷。
连接一体机电源时,请检查输入电源。如果所连接的输入电源与额定输入功率不同(22-60VDC),则产品可能无法正常工作,或者控制器可能会损坏。
安装环境
安装控制器时,请考虑以下事项。
安装控制器之前,请确保足够的空间。
控制器必须固定。
确保移动车辆中没有任何部件未固定。
硬件安装
安装机械手,控制器和教学手控盒以及系统的关键组件,并在操作机械手之前为其供电。每个元件的安装说明如下:
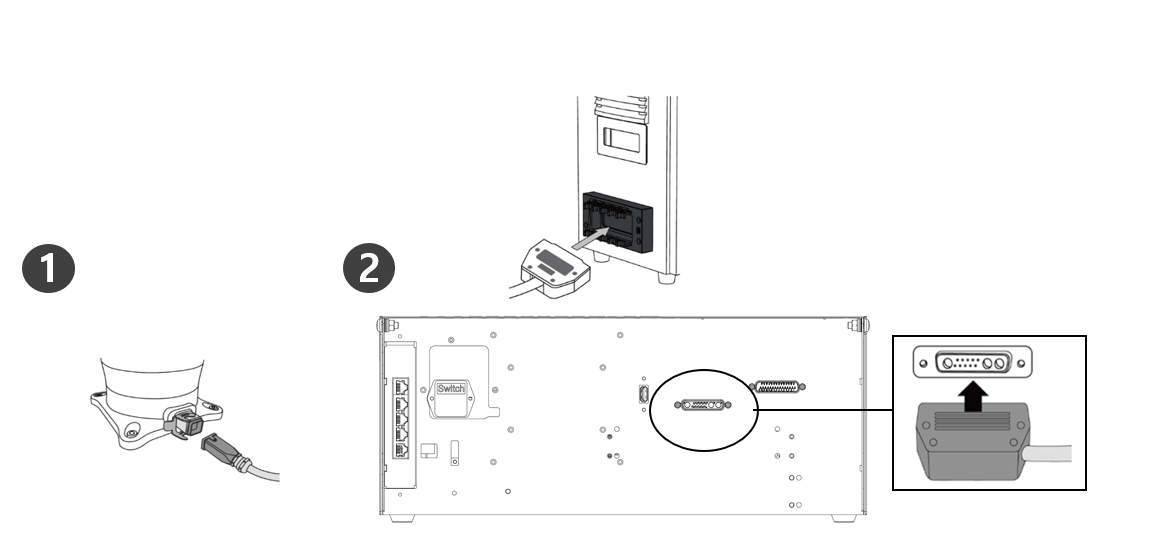
将机械手连接到控制器
说明 | |
|---|---|
1 | 将机械手电缆连接至控制器,放置固定环
|
2 | 将机械手连接电缆的另一端连接到控制器
|
小心
机械手开启时,请勿断开机械手电缆的连接。这可能会导致机械手发生故障。
请勿尝试对机械手拉索进行任何改装或延长。
将控制器安装在地板上时,应确保每侧至少有50毫米的间隙,以确保通风良好。
打开控制器之前,请确保正确锁定连接器。
注意
配置系统时,建议安装降噪器,以防止系统的噪音影响和故障。
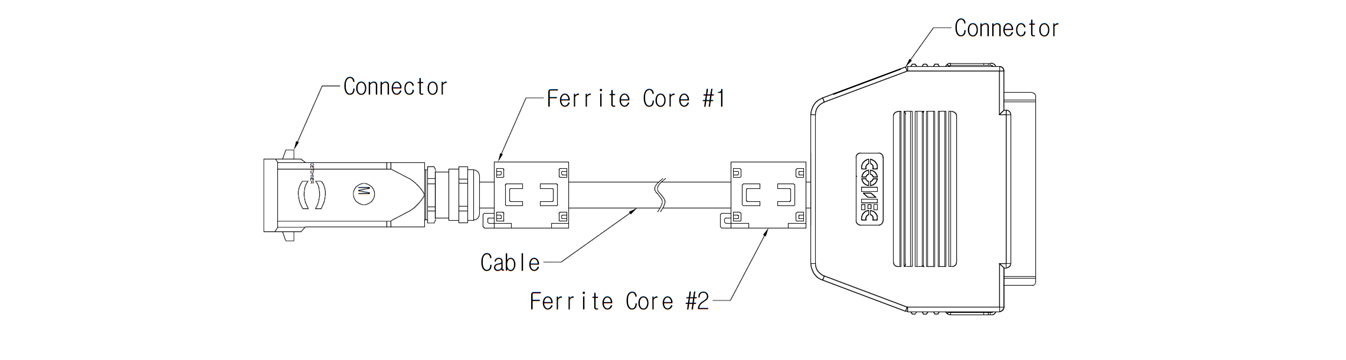
如果控制器受到电磁波产生的噪音的影响,则必须安装铁氧体磁芯以确保正常运行。安装位置如下:
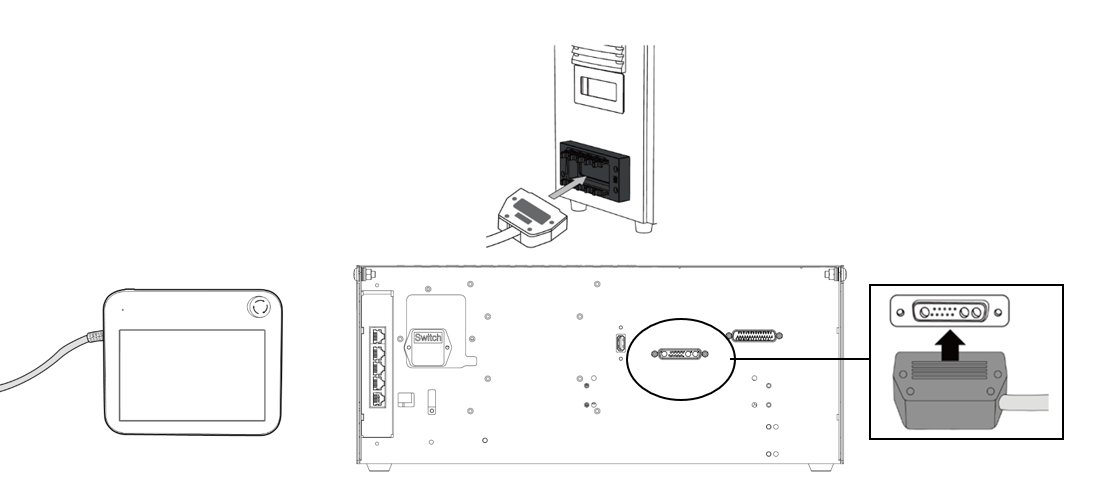
将控制器连接到教学手控盒
将示教手控盒电缆连接到控制器上的相应接头,直至其发出咔嗒声,请确保电缆已牢固插入。
小心
连接电缆时,请先检查连接的形状,然后再连接,以确保针脚不弯曲。
如果通过悬挂在移动车辆或控制器上来使用示教手控盒,请小心不要绊倒连接的电缆。
小心不要让控制器,教导手控盒和电缆接触到水。
切勿在多尘或潮湿的环境中安装控制器和教学手控盒。
控制器和智能手控盒绝不能暴露在IP20以上的灰尘环境中。在有导电粉尘的环境中尤其要小心。
注意
配置系统时,建议安装降噪器,以防止系统的噪音影响和故障。
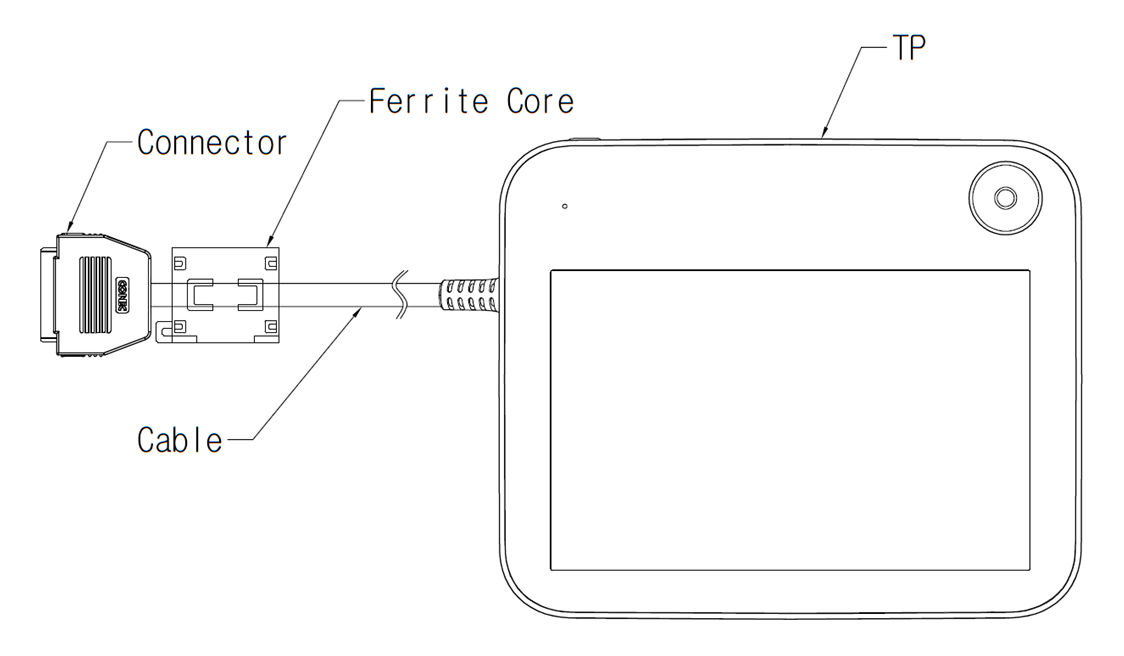
如果示教手控盒受电磁波产生的噪音影响,则有必要安装铁氧体磁芯以确保正常操作。安装位置如下:
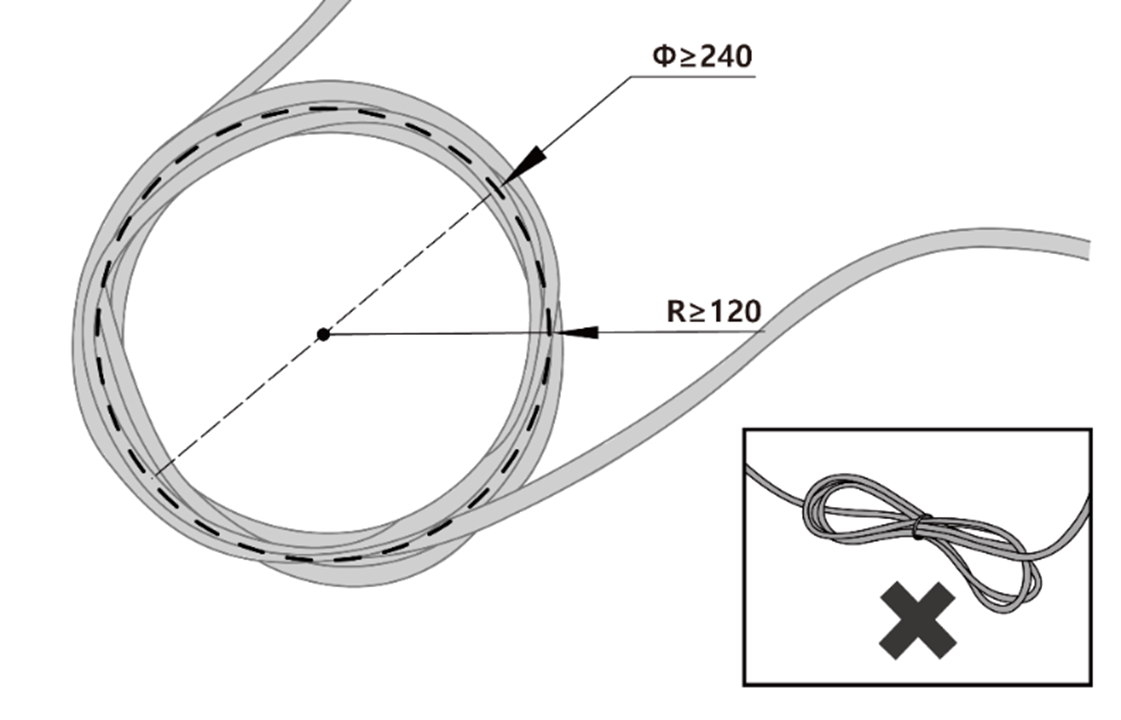
放置机械手电缆和教学手控盒电缆
确保操纵器和教学手控盒电缆的曲率半径大于最小曲率半径(120 mm)。
小心
确保示教手控盒电缆与示教手控盒连接器之间的曲率半径大于最小曲率半径(120毫米)。
如果曲率半径小于最小曲率半径(120 mm),可能会导致电缆断开连接或产品损坏。
在可能产生电磁噪音的环境中,必须正确安装电缆以防止出现故障。
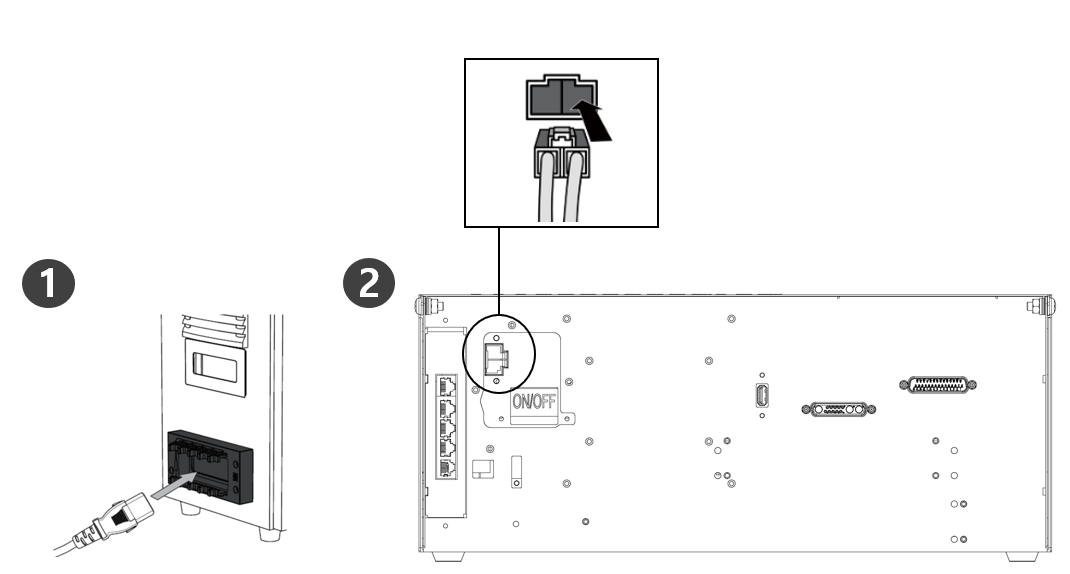
将电源连接至控制器
将电源线连接至控制器上的相应接头,直至其发出咔嗒声,请确保电缆已牢固插入。
警告
连接电源线(电气接地连接)后,请确保机械手正确接地。使用与控制器内接地符号相关的未使用螺栓,为系统中的所有设备建立公共接地。接地导体必须满足系统的最大额定电流。
使用断路器等设备保护控制器的输入电源。
请勿修改或延长机械手电缆。它可能导致火灾或控制器故障。
确保所有电缆均已正确连接,然后再向控制器供电。务必使用产品包装中的原装电缆。
注意不要将输入电压的极性连接不正确。
注意
配置系统时,建议安装能够立即关闭所有设备的电源开关。
使用直流控制器时,机械手的运动可能会受到限制,具体取决于负载和运动。
如果输入电压低于48V,机械手的移动可能会根据负载和运动受到限制。
电源必须满足接地和断路器等最低要求。电气规格如下:
参数 | 规格 |
输入电压 | 22–60 VDC |
额定输入电流 | 30 A |