
移动面板
菜单
项目 | 说明 | |
|---|---|---|
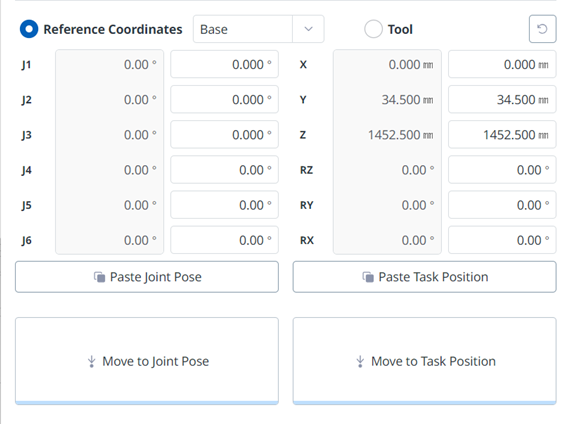
16 | 选择参考坐标系 | 选择要用于图18中的任务坐标的参考坐标系。您可以选择基准坐标,世界坐标或用户坐标。 |
17 | 联合姿势 | 显示当前机械手姿势和目标关节姿势。 |
18 | 任务姿势 | 显示当前机器人姿势和适合所选参考坐标系的目标任务姿势。 |
19 | 粘贴联合姿势 | 将复制到剪贴板的姿势值粘贴到连接姿势面板中。 |
20 | 粘贴任务状态 | 将复制到剪贴板的姿势值粘贴到任务姿势面板中。 |
21 | 接合移动按钮 | 此按钮可使机械手移至目标关节姿势。 |
22 | 任务移动按钮 | 此按钮可使机械手移至目标任务姿势。 |
设置移动角度
要以特定角度移动机械手,请按照以下步骤操作:
选择 移动 选项卡。
输入机械手接头的目标角度。(对于P系列型号,J4已禁用)
启用 Real Mode(实模式)。
轻触并按住 Move to related Joint Position (移动到相应的关节姿势)按钮以调整机械手关节角度。
设定要移动的基体参考坐标
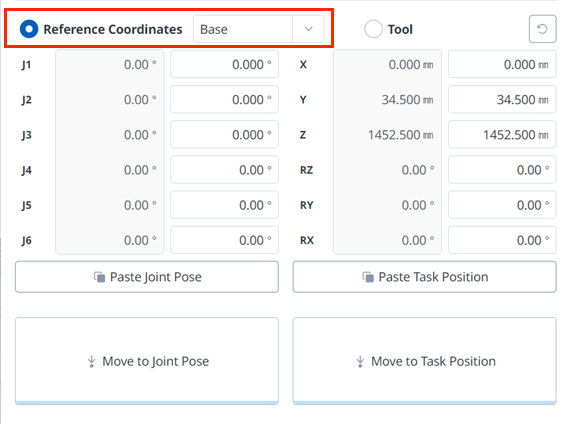
要根据机械手的基准坐标移动机械手,请执行以下步骤:
选择 移动 选项卡和 参考坐标。
选择显示坐标作为基准。
轻触并按住 移动到相应的任务姿势 按钮以移动到设置坐标。
设置要移动的世界坐标参考坐标
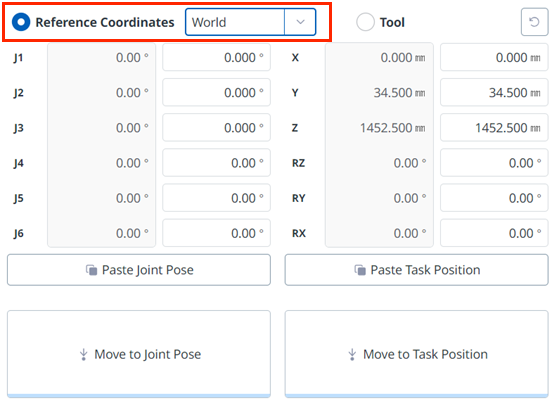
要根据世界坐标移动机械手,请按照下列步骤操作:
选择 移动 选项卡和 参考坐标。
选择World (世界)作为显示坐标,然后选择World (世界)选项卡。
参照世界坐标配置要移动的姿势。
轻触并按住 移动到相应的任务姿势 按钮以移动到设置坐标。
根据工具设置要移动的坐标
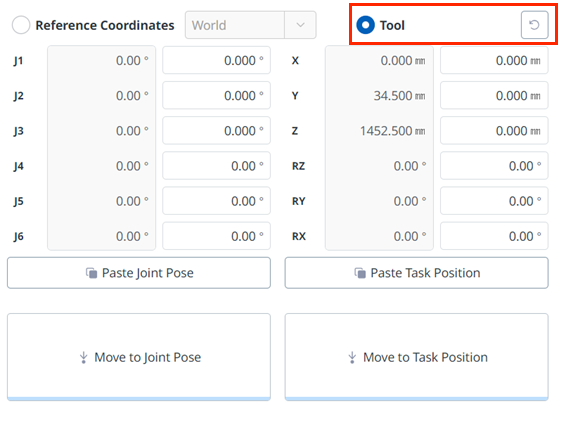
要根据刀具坐标移动机械手,请执行以下步骤:
选择"移动" 选项卡,然后选择" 工具 "选项卡。
参照工具配置要移动的姿势。
轻触并按住移动到相应的任务姿势 按钮以移动到设置坐标。