
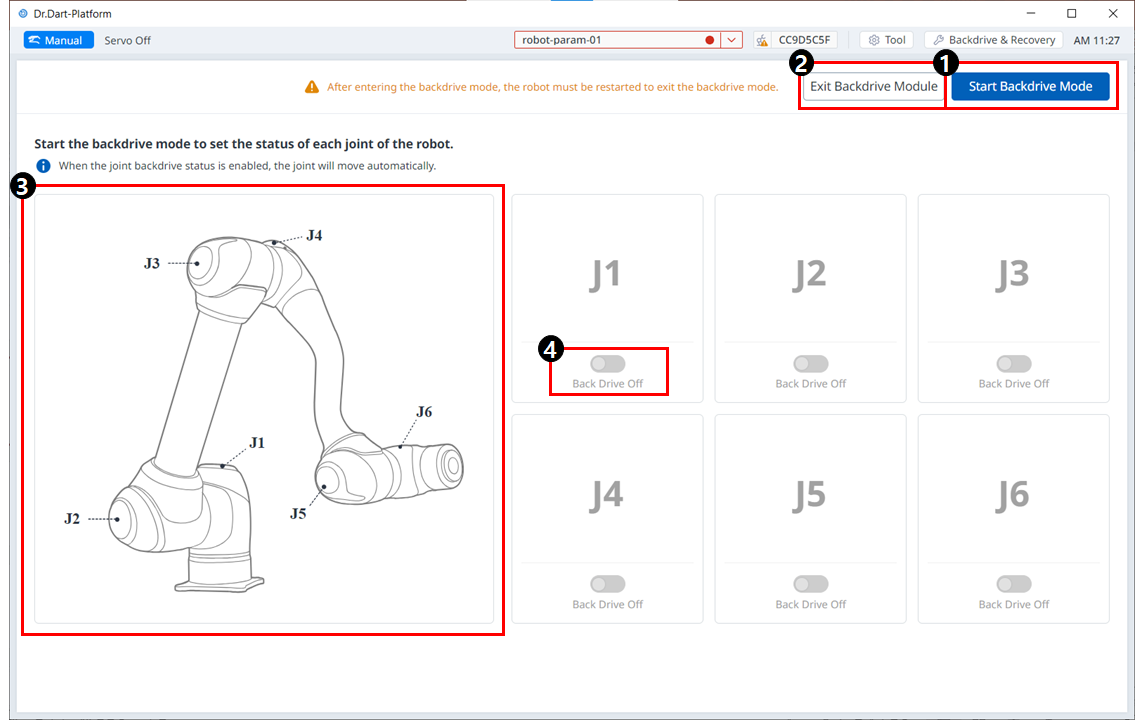
后驱动器模块
Backdrive会切断电机的电源,仅释放制动器以允许机器人的接头在外力下移动。当机械手无法通过 恢复 模式或手导模式返回正常状态时,可使用此功能。使用 Backdrive 模式,用户可以接合或分离每个接头的制动器。

要访问Backdrive模块,请轻触底部的Backdrive (Backdrive)按钮。
菜单
项目 | 说明 | |
|---|---|---|
| 1 | 启动BackDrive模式 | 此按钮允许您运行Backdrive模式。 |
| 2 | 退出Backdrive | 此按钮允许您退出Backdrive模块。 |
| 3 | 关节图像 | 这是描述每个接头位置的图像。 |
| 4 | 开/关切换按钮 | 您可以选择是否为每个接头启用。 |
设置 Backdrive 模式的过程如下:
轻触 主菜单 Backdrive 按钮上的Status (状态)按钮。
如果 未启用Backdrive (退回驱动)按钮,则按下并释放紧急停止按钮或按下 Servo Off (伺服关闭)按钮将启用该按钮。
在 伺服开启 状态下,将出现以下弹出窗口,伺服将自动禁用。
轻触 Backdrive 屏幕上的Start Backdrive Mode (开始Backdrive模式)按钮。
关闭/打开按钮被激活,以释放每个接头上的制动器。

将接头的制动器设置为关闭(释放),并通过施加力移动机械手。
由于接头内减速器的减速比,由于操纵器重量导致的接头下垂速度不高,施加力时的移动速度也不高。
如果减速器发生故障,或者在零重力运动过程中,如果接头的移动速度超过一定速度,则所有接头的制动器都会自动应用,以确保安全。
位置变更完成后,打开(保持)制动器。
轻触 主菜单上的电源以关闭操作程序,轻触并按住示教手控盒顶部的电源按钮以关闭系统,然后再次按下此按钮以打开系统。
Backdrive 状态为"已释放",工作可以正常恢复。
注意
按顺序逐个将每个接头移回正常工作范围。
如果 执行Backdrive模式,则必须重新引导系统才能再次恢复正常工作。
请注意,在 Backdrive 模式下,根据轴的位置,可能会出现临时下垂现象。