
对齐面板
菜单
项目 | 说明 | |
|---|---|---|
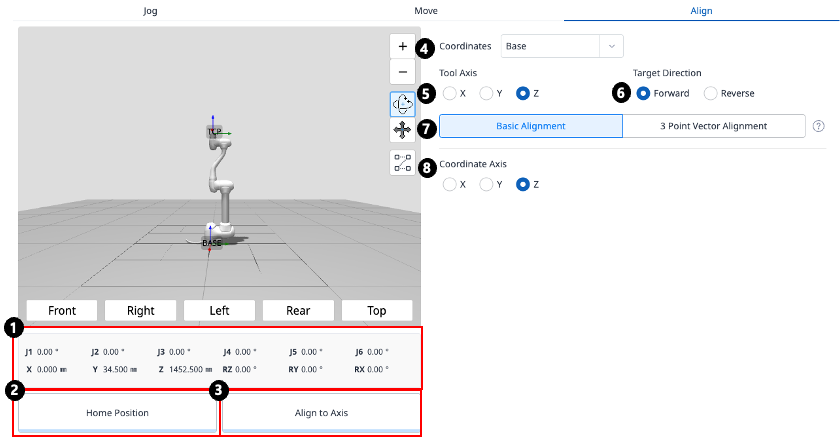
1 | 机器人姿势 | 显示当前机器人的关节姿势和任务姿势。 |
2 | 原位置按钮 | 单击时将机械手移至原始位置。 |
3 | 对齐按钮 | 单击时对齐机械手。 |
4 | 选择参考坐标系 | 选择要定位的参考坐标系。 |
5 | 刀具轴 | 选择要对齐的TCP轴。 |
6 | 目标方向 | 选择与TCP对齐的方向。 |
7 | 对齐方法 | 选择对齐方法。 |
8 | 坐标轴 | 选择要与参考坐标系的哪个轴对齐。 |
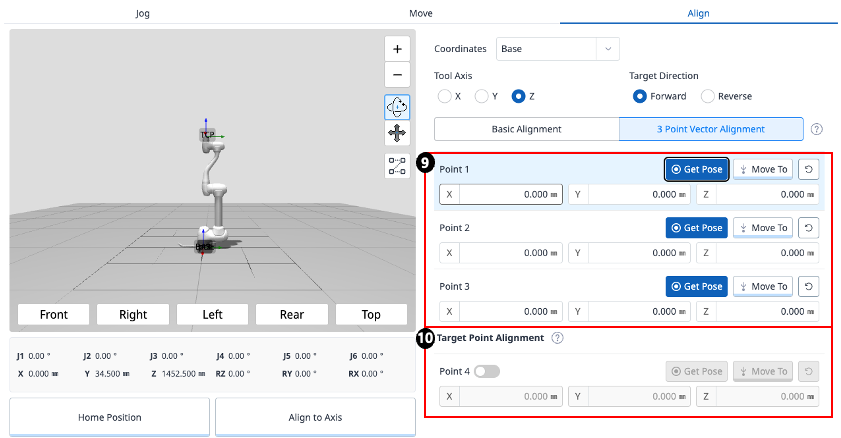
9 | 选择基准面上的点 | 选择定义基准面的三个点。 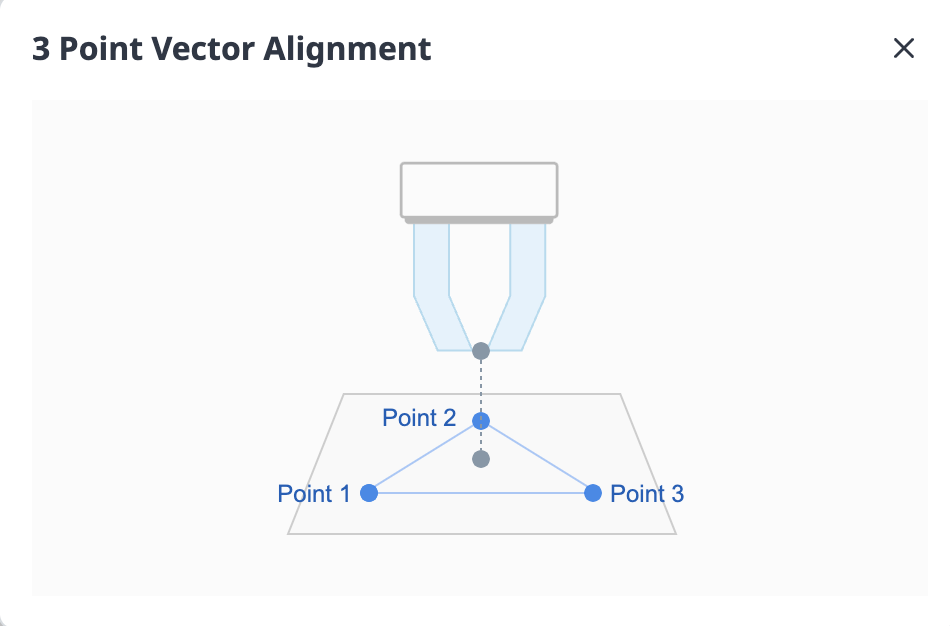 |
10 | 目标点对齐 | 选择一个点以定位TCP。 |
菜单
项目 | 说明 | |
|---|---|---|
1 | 机器人姿势 | 显示当前机器人的关节姿势和任务姿势。 |
2 | 原位置按钮 | 单击时将机械手移至原始位置。 |
3 | 对齐按钮 | 单击时对齐机械手。 |
4 | 选择参考坐标系 | 选择要定位的参考坐标系。 |
5 | 刀具轴 | 选择要对齐的TCP轴。 |
6 | 目标方向 | 选择与TCP对齐的方向。 |
7 | 对齐方法 | 选择对齐方法。 |
8 | 坐标轴 | 选择要与参考坐标系的哪个轴对齐。 |
9 | 选择基准面上的点 | 选择定义基准面的三个点。 |
10 | 目标点对齐 | 选择一个点以定位TCP。 |