机械手限制和安全
机械手极限设置
在"机械手限值"中,可以设置与机械手相关的各种限值。这些限制用于确保机械手在设定的限制范围内安全运行。
机械手限值可以在 机械手参数>安全设置>机械手限值中设置。
有关每个限制的详细说明,请参阅 机械手限制。
机器人限制主要分为3类。每个类别包括以下屏幕和功能。
菜单
项目 | 说明 | |
|---|---|---|
| 1 | 锁定切换按钮 | 用于锁定设定值。修改设定值需要安全密码。 |
| 2 | TCP/机械手 | 机器人极限的大分类。 |
| 3 | 重置 | 用于重置设置。 |
| 4 | 力 | 用于设置力。 |
| 5 | 电源 | 用于设置电源。 |
| 6 | 速度 | 用于设置速度。 |
| 7 | 势头 | 用于设置动力。 |
| 8 | 碰撞 | 用于设置冲突。 |
| 9 | 保存 | 用于保存适用的设置。 |
菜单
项目 | 说明 | |
|---|---|---|
| 1 | 锁定切换按钮 | 用于锁定设定值。修改设定值需要安全密码。 |
| 2 | 接头速度 | 机器人极限的大分类。 |
| 3 | 重置 | 用于重置设置。 |
| 4 | J1 | 用于分别设置"正常"和"减少"模式的设置。 |
| 5 | J2 | 用于分别设置"正常"和"减少"模式的设置。 |
| 6 | J3 | 用于分别设置"正常"和"减少"模式的设置。 |
| 7 | J4 (对于P系列型号不活动) | 用于分别设置"正常"和"减少"模式的设置。 |
| 8 | J5 | 用于分别设置"正常"和"减少"模式的设置。 |
| 9 | J6 | 用于分别设置"正常"和"减少"模式的设置。 |
| 10 | 保存 | 用于保存适用的设置。 |
菜单
项目 | 说明 | |
|---|---|---|
| 1 | 锁定切换按钮 | 用于锁定设定值。修改设定值需要安全密码。 |
| 2 | 接合角 | 机器人极限的大分类。 |
| 3 | 重置 | 用于重置设置。 |
| 4 | J1 | 用于分别设置"正常"和"减少"模式的设置。 |
| 5 | J2 | 用于分别设置"正常"和"减少"模式的设置。 |
| 6 | J3 | 用于分别设置"正常"和"减少"模式的设置。 |
| 7 | J4 (对于P系列型号不活动) | 用于分别设置"正常"和"减少"模式的设置。 |
| 8 | J5 | 用于分别设置"正常"和"减少"模式的设置。 |
| 9 | J6 | 用于分别设置"正常"和"减少"模式的设置。 |
| 10 | 保存 | 用于保存适用的设置。 |
安全I/O
此功能用于向冗余端子输入/输出安全相关信号。如果检测到任何安全输入/输出信号具有不同的冗余信号,它将确定开路或硬件故障,并在STO停止模式下停止机械手。
要设置安全I/O,请选择 机械手参数>安全设置>安全I/O。
有关详细信息,请参阅 安全信号I/O 。
输入
菜单
项目 | 说明 | |
|---|---|---|
| 1 | 锁定切换按钮 | 用于锁定设定值。修改设定值需要安全密码。 |
| 2 | 输入/输出 | 可以选择输入/输出进行设置。 |
| 3 | 信号设置 | 为每个端口设置选项。 未使用 |
| 4 | 根据机械手状态选择是否忽略信号 | 如果选择"保护停止"信号,则可以设置是否忽略"手动,恢复,HGC"机械手状态中的选定信号。 |
| 5 | 设置减速率 | 您可以设置减速率。它可以介于0到100之间。 |
| 6 | 保存 | 使用此按钮可以保存您输入的设置。 |
输出
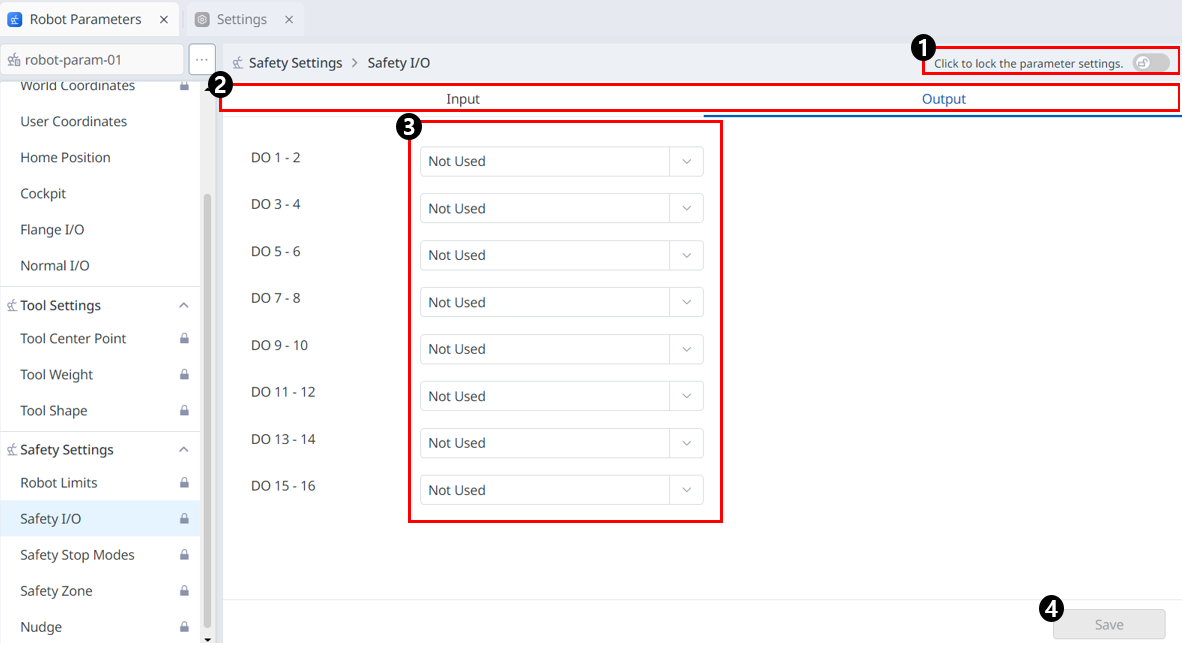
菜单
项目 | 说明 | |
|---|---|---|
| 1 | 锁定切换按钮 | 用于锁定设定值。修改设定值需要安全密码。 |
| 2 | 输入/输出 | 可以选择输入/输出进行设置。 |
| 3 | 信号设置 | 为每个端口设置选项。 未使用 |
| 4 | 保存 | 使用此按钮可以保存您输入的设置。 |
安全停止模式设置
了解安全挡块的类型以及如何接合/脱离安全挡块。
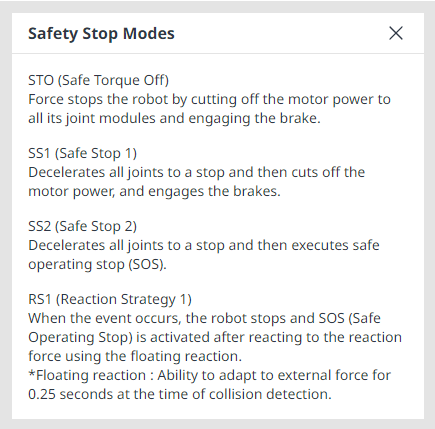
安全挡块类型
为确保用户安全而提供的停止模式如下所示:
STO (安全扭矩关闭):停止伺服关闭(马达电源立即关闭)
SS1 (安全停止1):最大减速停止后伺服关闭
SS2 (安全停止2):最大减速停止后待机(暂停)
RS1:碰撞时,遵循碰撞相反的方向,然后进入待机状态(只能在碰撞检测/TCP力限制违规中设置)
斗山机器人有两种安全停止功能。紧急停机用于一般紧急情况,机械手可以在释放紧急停机后在伺服打开的情况下恢复操作。如果出现"保护停止",机械手可以通过解决"保护停止"的原因并松开停止装置来恢复操作。
紧急停机:当激活教学手控盒或附加安装的外部设备的紧急停止按钮时,它将设置停止模式
当按下示教手控盒的紧急停止开关或连接到TBSFT EM终端的紧急停止开关时,它将激活。
只能选择STO或SS1。
保护挡块:当外部连接的防护设备激活时,它会设置停止模式
当连接到TBSFT PR终端的防护设备被激活时,它会激活。
有关安全停止功能的详细信息,请参阅 安全功能。
如何接合/分离安全挡块
按下示教手控盒上的紧急停止按钮或激活连接到安全I/O的安全装置以激活紧急停止。安全设备可通过 教学手控盒屏幕的机械手参数>安全设置>安全I/O功能连接到紧急停止或保护停止。
菜单
项目 | 说明 | |
|---|---|---|
| 1 | 锁定切换按钮 | 用于锁定设定值。修改设定值需要安全密码。 |
| 2 | 信息消息 | 提供设置所需信息的消息。 |
| 3 | 重置 | 用于重置设置的按钮。 |
| 4 | 紧急停止 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO SS1 |
| 5 | 保护停止 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: SS1 SS2 |
| 6 | 超出接头角度限制 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO SS1 SS2 |
| 7 | 超出接头速度限制 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO (H/P系列除外) SS1 SS2 |
| 8 | 接头扭矩超出极限值 | 只有STO可用。 |
| 9 | 碰撞检测 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO (H/P系列除外) SS1 SS2 RS1 |
| 10 | TCP机械手位置超出限制 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO SS1 SS2 |
| 11 | 违反TCP方向限制 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO (H/P系列除外) SS1 SS2 |
| 12 | TCP速度限制违规 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括以下内容: STO (H/P系列除外) SS1 SS2 |
| 13 | TCP强制限制违规 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO (H/P系列除外) SS1 SS2 |
| 14 | 超出动量极限 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO (H/P系列除外) SS1 SS2 |
| 15 | 机械限值超出 | 可以选择安全停止器以用于对应的项目。 下拉菜单包括: STO (H/P系列除外) SS1 SS2 |
| 16 | 保存 | 此按钮允许您保存设置值。 |
注意
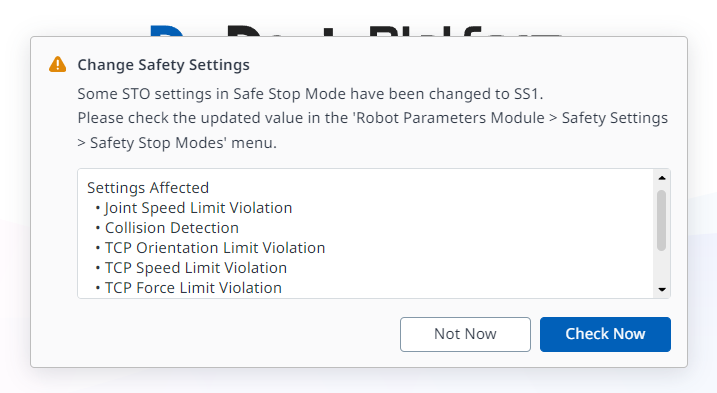
以下弹出窗口出现在信息消息中:
注意
从版本3.2.2开始,H型安全停止模式中的一些STO设置已更改为SS1。
如果使用的值已更新,将出现以下弹出窗口。