
测量方法和条件
停止距离是从生成停止信号到所有机械手停止操作的角度。
停止时间是从生成停止信号到所有机械手停止操作的时间。
提供了具有较大行程距离的接头1,接头2和接头3的停止距离和停止时间数据。
重叠轴的移动可能导致停止距离更长。
停止距离和停止时间数据是根据KS B ISO 10218-1:2011 声明和认证定义的。
停止类别
停止类别 | 说明 | |
|---|---|---|
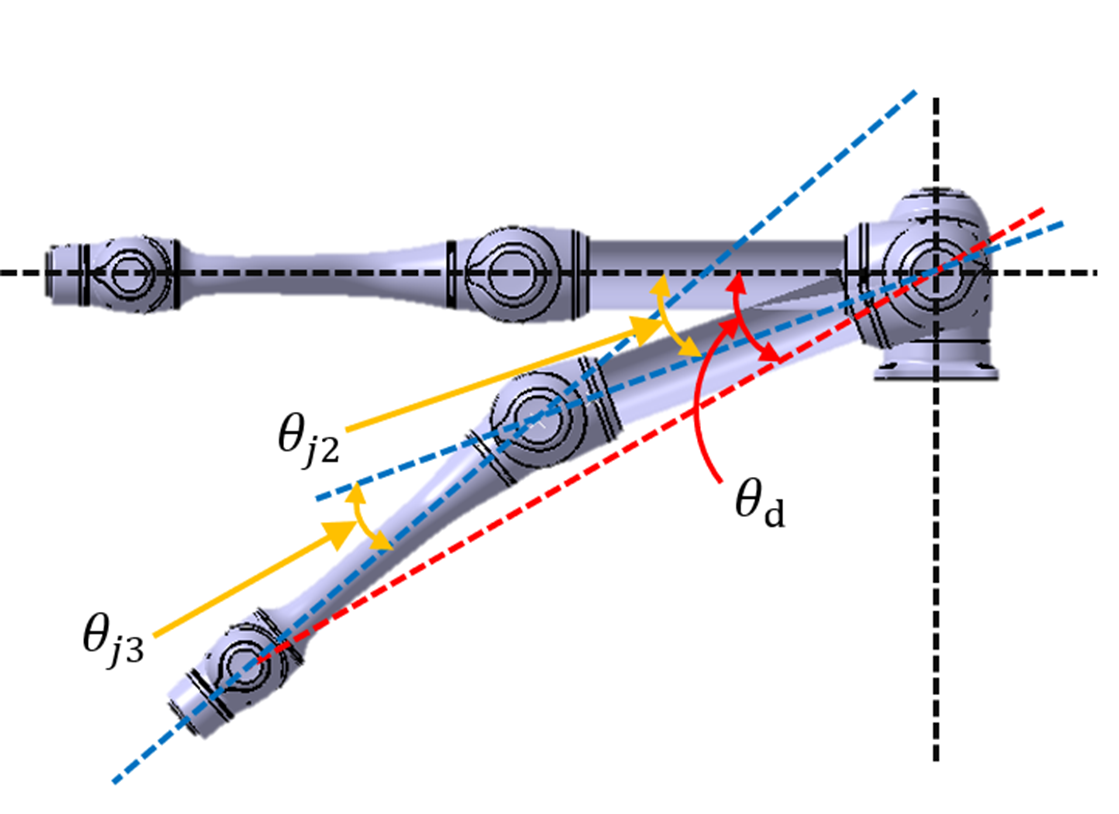
| 1 | 停止类别0 | 接头1 (底座), 接头2 (肩部) 和 接头3 (弯头)的停止距离和停止时间 是在最大速度,拉伸水平和负载条件下测量的。 接头2 和 接头3的轴 彼此平行,因此强制停止对一个零件造成的冲击可能会导致另一侧打滑。还测量角度偏差。 |
| 2 | 停止类别1 | 接头1 (底座)和接头2 (肩部)的停止距离和停止时间 分别在最大速度,拉伸水平和负载的33%,66%和100%下测量。 接头3 (弯头)的停止距离和停止时间 是在最大速度和负载的33%,66%和100%时测量的。 由于下臂长度和手腕完全平坦,在接头3测量过程中的拉伸水平锁定在最大位置。 |
测量姿势和条件
在水平移动过程中,在旋转轴垂直于地面的情况下进行接合1测量。
在旋转轴与地面平行的情况下,以及在机械手垂直于地面向下移动时,执行接头2和接头3测量。
注意
测量结果是最坏情况下的结果。测量值可能因情况而异
扩展的33%,66%和100%的姿势
| 接头1 | 接头2 | 接头3 |
100%扩展 停止类别0 |
 |
 |
 |
33%扩展 停止类别1 |
 |
 |
- |
66%扩展 停止类别1 |
 |
 |
- |
100%扩展 停止类别1 |
 |
 |
 |
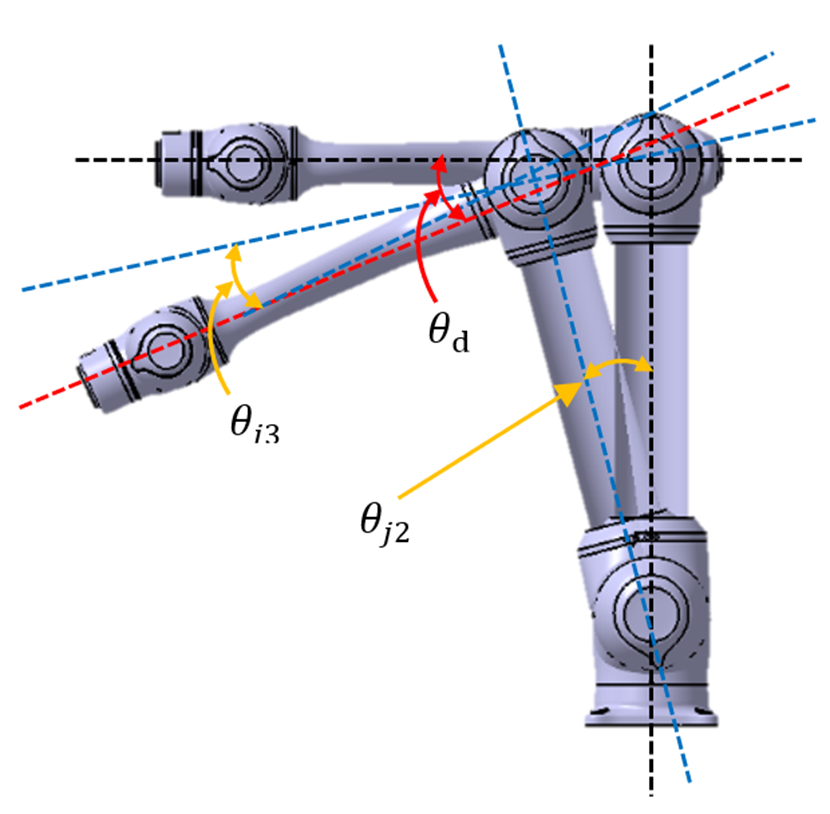
启动停止时的姿势和测量角度(θd)
开始停止时的姿势 | 测量角度 | |
联接1 |
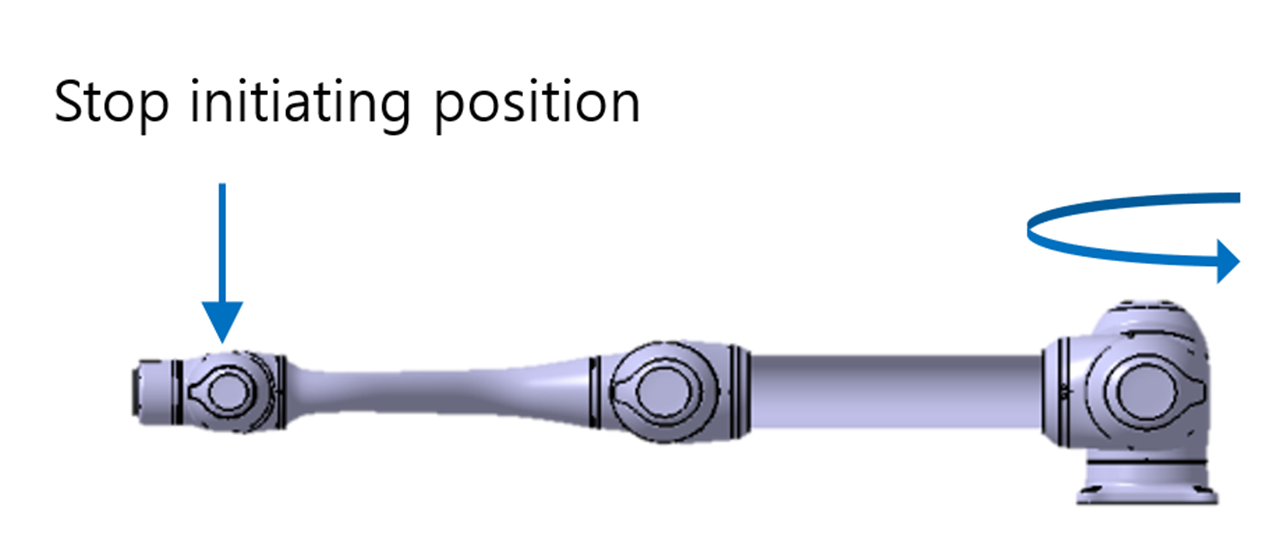 | 不打滑,
|
联接2 |
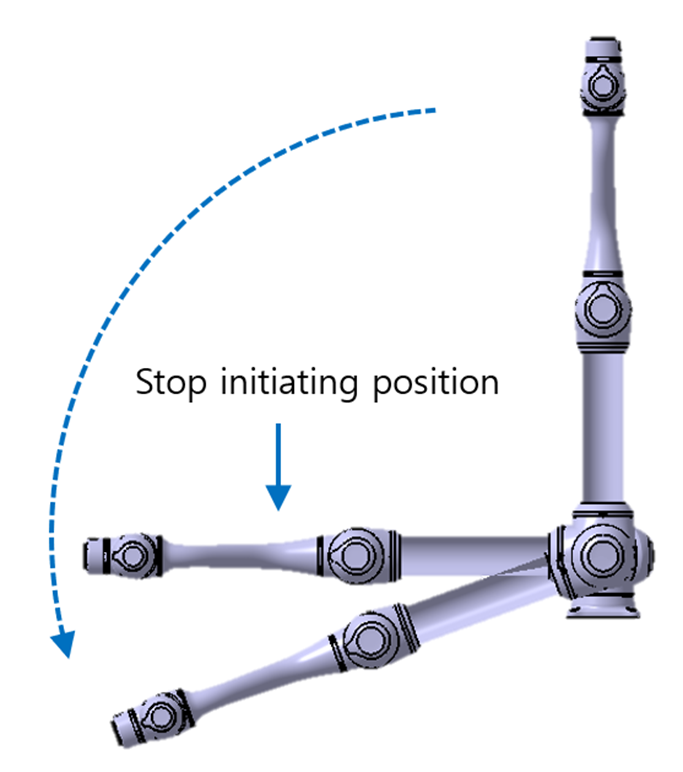 |
 |
联接3 |
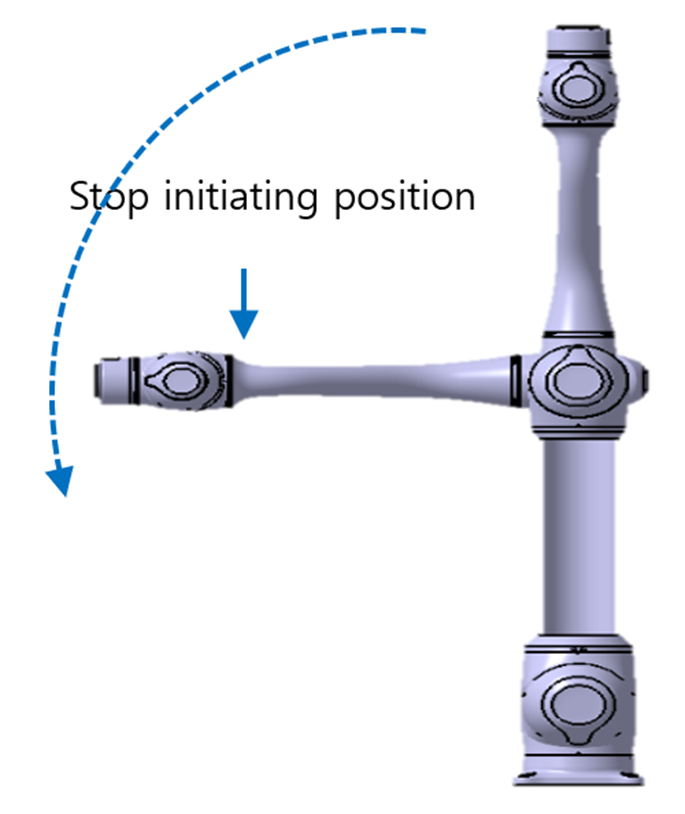 |
 |