连接外部设备
连接外部设备-视力传感器
机器人可与视觉传感器(用于物体位置测量的2D相机)连接,视觉传感器测量结果可通过网络传输到机器人,以与机器人的命令连接。
视觉传感器设置
通信连接设置
连接设备的LAN端口并应用TCP/IP通信将视觉传感器测量值传输到机器人。(请参阅 网络连接)将视觉传感器的IP地址设置为TCP/IP 192.168.137.xxx波段以允许TCP/IP通信。
视觉工作设置
要执行物体位置测量,必须使用视觉传感器对目标物体进行图像输入和视觉教学。请参阅视觉传感器制造商提供的专用视觉工作设置程序。
测量数据格式设置
要在机器人工作中使用视觉传感器测量数据,必须执行视觉-机器人坐标校准,这必须在使用视觉传感器设置程序开始工作之前执行。必须使用以下格式设置传输视觉传感器测量数据:
格式 | 位置 | , | X | , | Y | , | 角度 | , | VAR1 | , | VAR2 | , | … |
|---|
位置:指示测量数据起点的分隔符(前缀)
X:使用视觉传感器测量的物体的X坐标值
Y:使用视觉传感器测量的物体的Y坐标值
角度:使用视觉传感器测量的物体旋转角度值
VAR1… Varn:使用视觉传感器测量的信息(例如,对象尺寸/缺陷检查值)示例)位置,254.5,-38.1,45.3,1,50.1 (描述:X=254.5,y=-38.1,角度=145.3,var1=1,var2=50.1)
机械手程序设置
完成视觉传感器与机器人和视觉传感器之间的物理通信连接后,必须设置一个程序以允许视觉传感器和机器人程序链接。可以使用斗山机器人语言(DRL)连接/通信/控制外部视觉传感器的功能,也可以在任务编写器中设置程序。
编程手册中提供了有关外部视觉传感器功能的斗山机器人语言(DRL)的详细信息和全面示例。
连接外部设备–DART平台
DART平台是一种在基于Windows操作系统的台式机或笔记本电脑上运行的软件。通过LAN端口连接控制器和台式机/笔记本电脑后,自DART平台执行之时起,教学手控盒的所有功能均可用。此时,需要执行以下设置步骤才能连接控制器内的子控制器。
IP地址搜索和连接设置
通信连接设置
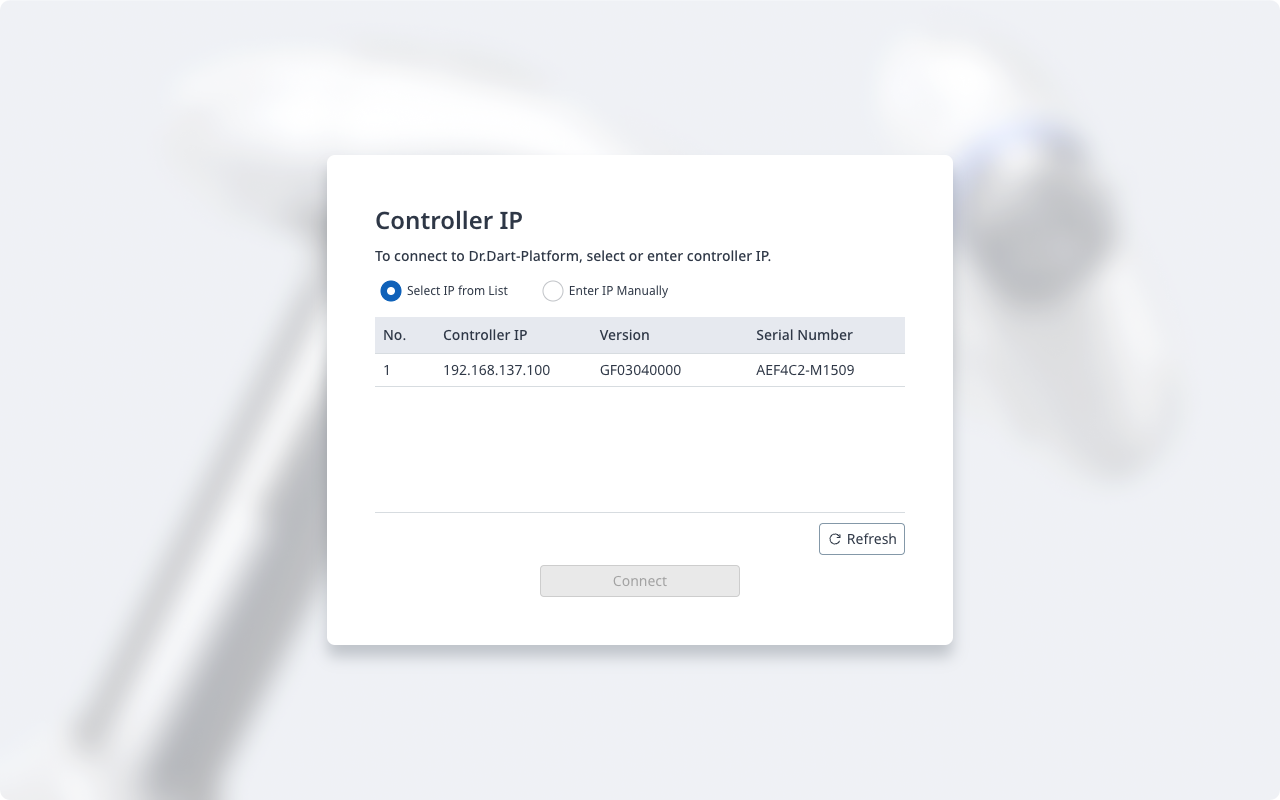
将膝上型计算机连接到控制器的LAN端口后执行DART平台时,将自动搜索控制器IP地址,子控制器的版本信息以及建立连接所需的机械手序列号。
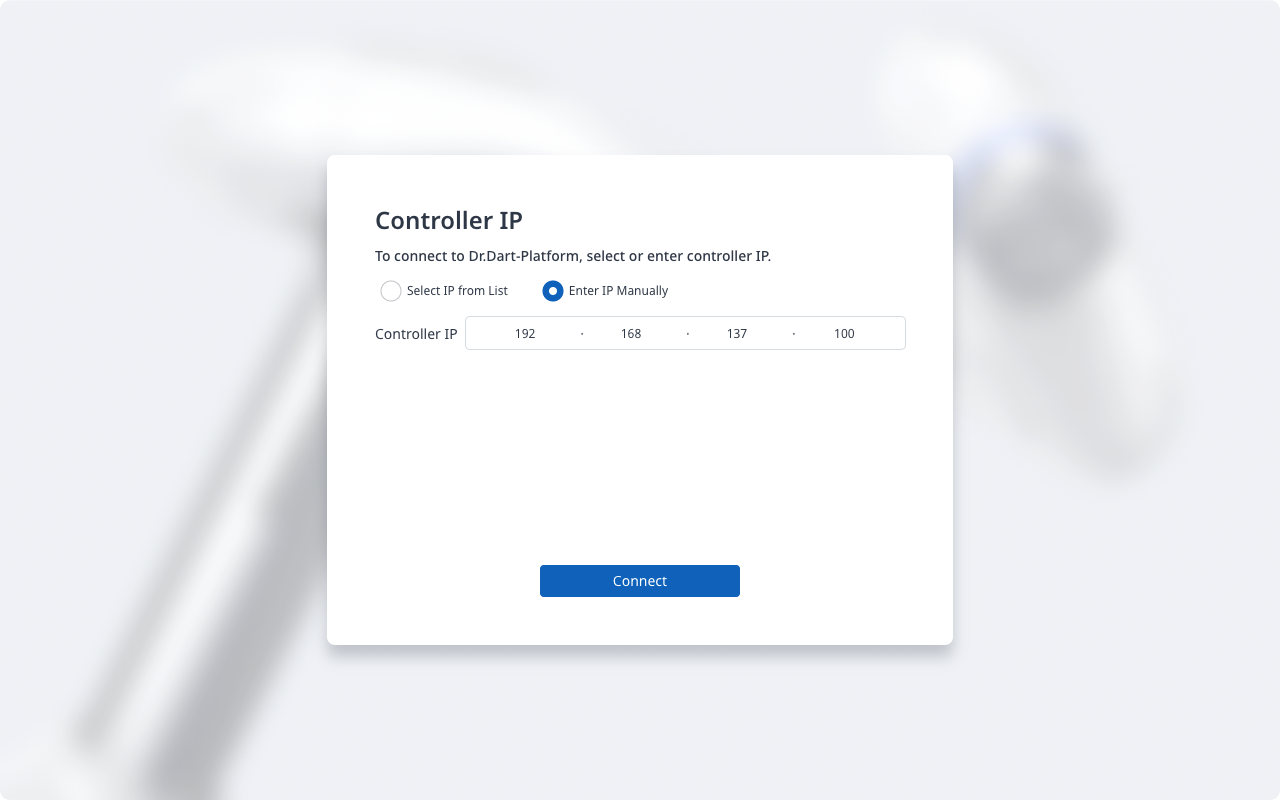
如果搜索失败,请按Refresh (刷新)按钮刷新,或轻触Enter IP Manually (手动输入IP)手动输入控制器的IP。
选择要连接的机械手的序列号并按下"连接"按钮可在DART平台和子控制器之间建立连接,并允许机械手正常操作。
如果连接出现问题,请尝试以下步骤,但如果此问题仍然存在,请联系销售或服务人员寻求帮助。
如果未显示可连接控制器IP地址,子控制器版本信息和机械手序列号的搜索结果:按"刷新"按钮再次搜索,然后根据上述步骤再次尝试连接。
然后,如果您看到如下所示的Transfer Control (传输控制)页面,请轻触Forced Withdraw (强制撤销)按钮以尝试连接平台。