对齐面板
对齐菜单
| Item | Description | |
|---|---|---|
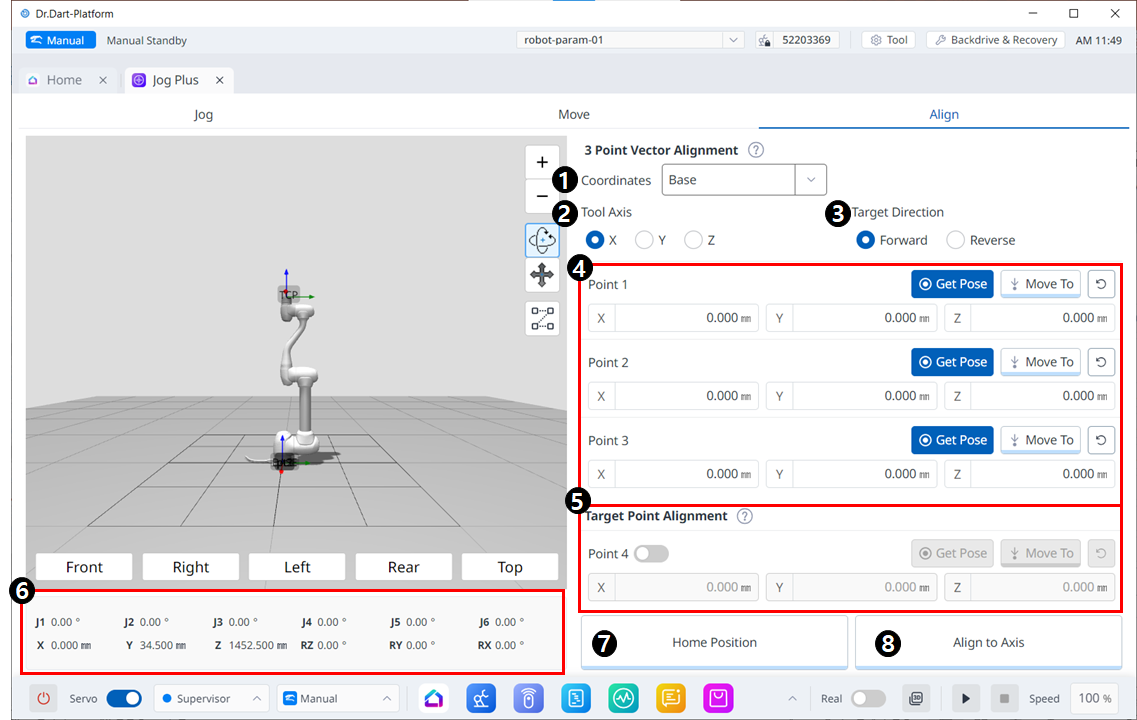
| 1 | Coordinates | 选择图 4 和 5 中位置的参考坐标系。 |
| 2 | Tool Axis | 选择要对齐的 TCP 轴。 |
| 3 | Target direction | 选择前进/后退方向 |
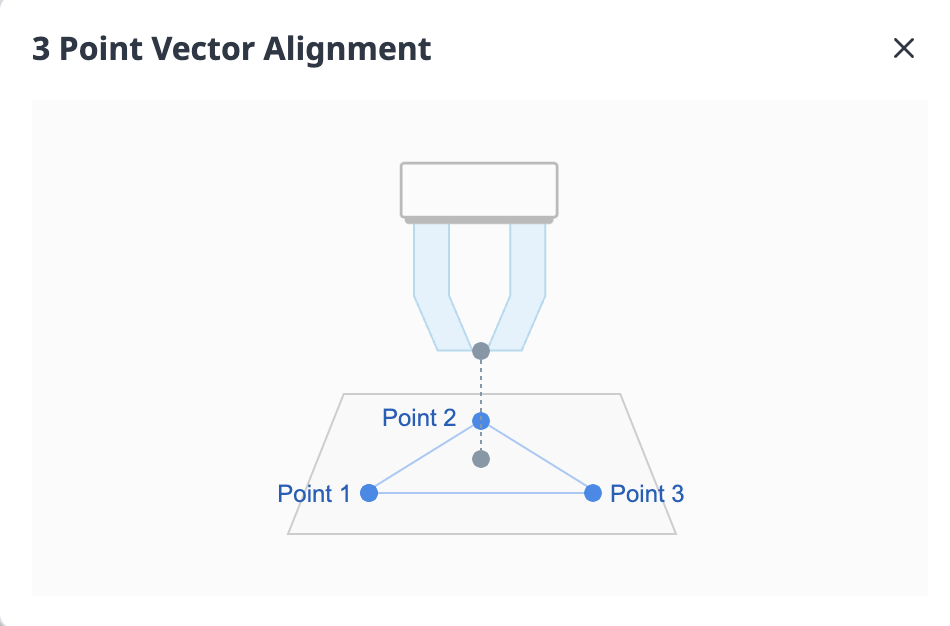
| 4 | Pick points on a plane | 选取三个点来定义平面。 定义如下:
|
| 5 | Target Point Alignment | 选择放置 TCP 的点。 这是可选的,如果未选中,则仅从当前位置开始对方向进行排序。 |
| 6 | Robot Posture | 显示当前机器人的关节姿态和任务姿态。 对于任务姿势,它遵循图1中选择的参考坐标系。 |
| 7 | Home Position | 当您单击该按钮时,它会移至起始位置。 |
| 8 | Align to Axis | 当您单击该按钮时,它会闪烁。 |