
Instalação (cs-12P)
Precauções de instalação
Cuidado
- Certifique-se de que existe espaço suficiente antes de instalar o controlador. A instalação em locais onde não há espaço disponível pode danificar o controlador ou fazer com que o coletor e o cabo do dispositivo pendente de teicabram.
- Quando ligar o produto, verifique a potência de entrada antes de o ligar. Se a potência de entrada não estiver conetada à potência nominal de entrada do Produto (22-60VDC), o Produto pode não funcionar corretamente ou danificar o controlador.
Ambiente de instalação
Ao instalar um controlador, considere as seguintes considerações:
- Certifique-se de que existe espaço suficiente antes de instalar o controlador.
- Certifique-se de que fixa o controlador.
- Certifique-se de que não existem outros objetos que não estejam seguros quando instalados no interior da unidade móvel.
Instalação de hardware
Antes de usar o robô, o sistema deve ter o coletor, o controlador e o pendente de teicpingente necessários instalados e conetados. Eis como instalar cada elemento:
Ligue o controlador ao controlador
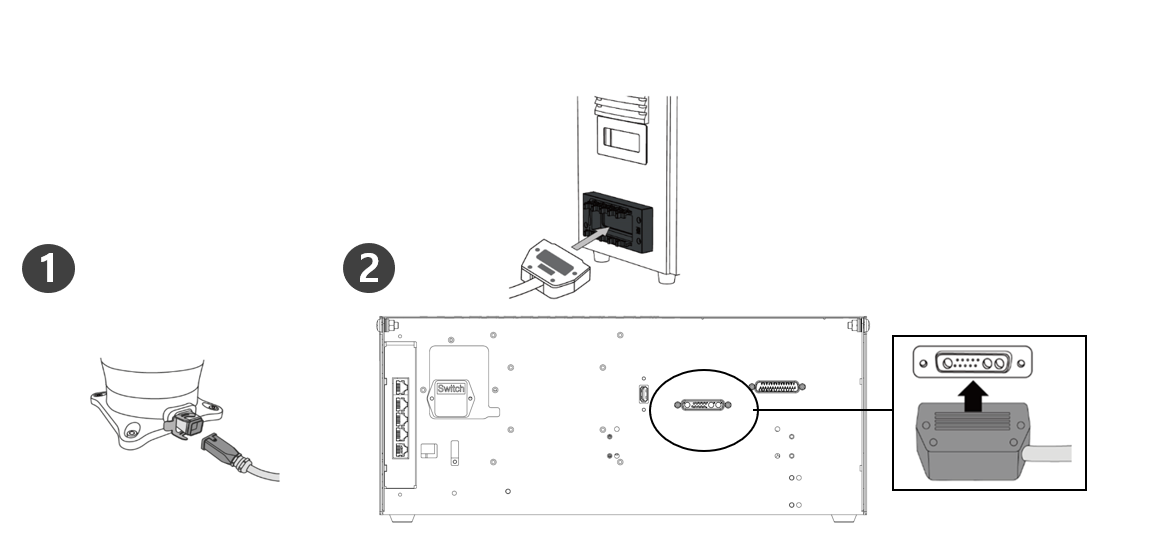
| 1 | Ligue o cabo ao coletor e aperte o gancho de fixação
|
| 2 | Ligue a outra extremidade do cabo ao controlador
|
Cuidado
- Não desconete o cabo do manifold enquanto o robô estiver ligado. Isto pode provocar uma avaria no robot.
- Não modifique nem estenda o cabo do manifold.
- Ao instalar o controlador no chão, certifique-se de que existe uma folga de 50 mm em ambos os lados para permitir a ventilação no equipamento.
- Certifique-se de que os conetores estão devidamente bloqueados antes de ligar o controlador.
Saber
- Ao configurar o sistema, recomenda-se a instalação de uma funcionalidade de redução de ruído para evitar os efeitos do ruído durante o periodo e o sistema de funcionamento incorreto.
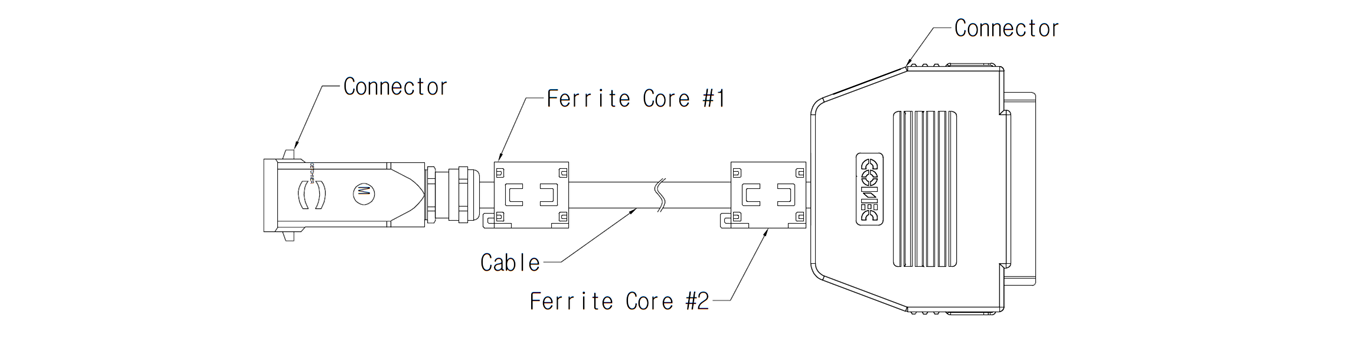
- Se o controlador for afetado por ruído eletromagnético ou outro equipamento, deve ser instalado um núcleo de ferrite para utilização normal. O local de instalação é mostrado abaixo.
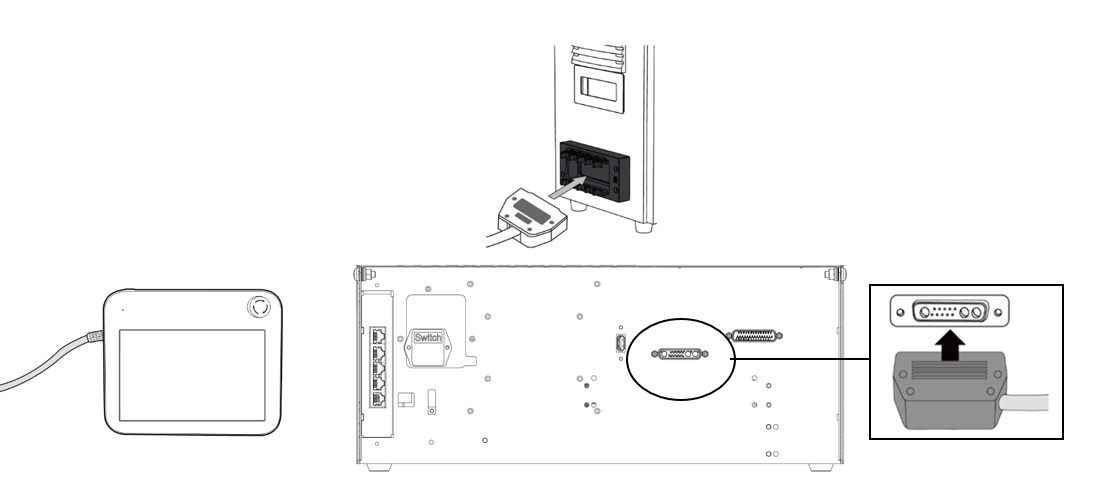
Ligar o Controller e o pendente de bruxa
Certifique-se de que o cabo não sai conetando o cabo pendente de entalhe à conexão correspondente no controlador até que ele se encaixe no lugar.
Cuidado
- Ao ligar cabos, certifique-se de que verifica a forma da ligação para evitar dobrar os pinos antes de os ligar.
- Ao utilizar o Smart Pendant numa parede ou num controlador, tenha cuidado para não tropeçar no cabo de ligação.
- Não permita que o controlador, cabo do pendente inteligente, entre em contacto com líquidos.
- Não instale o controlador e o pendente inteligente em ambientes poeirentos ou húmidos.
- O controlador e o pendente inteligente nunca devem ser expostos a ambientes com pó que excedam a classificação IP20. Tenha muito cuidado em ambientes com poeiras difíceis.
Saber
- Ao configurar o sistema, recomenda-se a instalação de uma funcionalidade de redução de ruído para evitar os efeitos do ruído durante o periodo e o sistema de funcionamento incorreto.
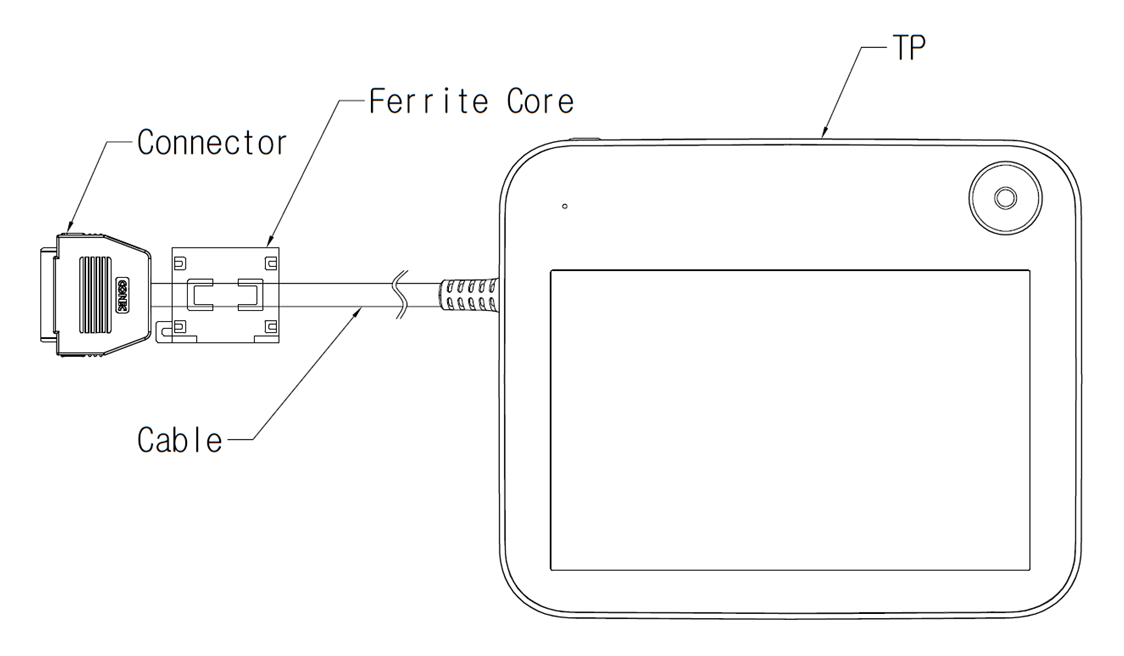
- Se o pendente de costura for afetado por ruído eletromagnético ou outro equipamento, o núcleo de ferrite deve ser instalado para uso normal. O local de instalação é mostrado abaixo.
Colocar o cabo no coletor e o cabo no pendente de suporte
Ao colocar um cabo conetando o manifold e um cabo pendente de costura, verifique se o cabo tem um raio mínimo de curvatura (120 mm).
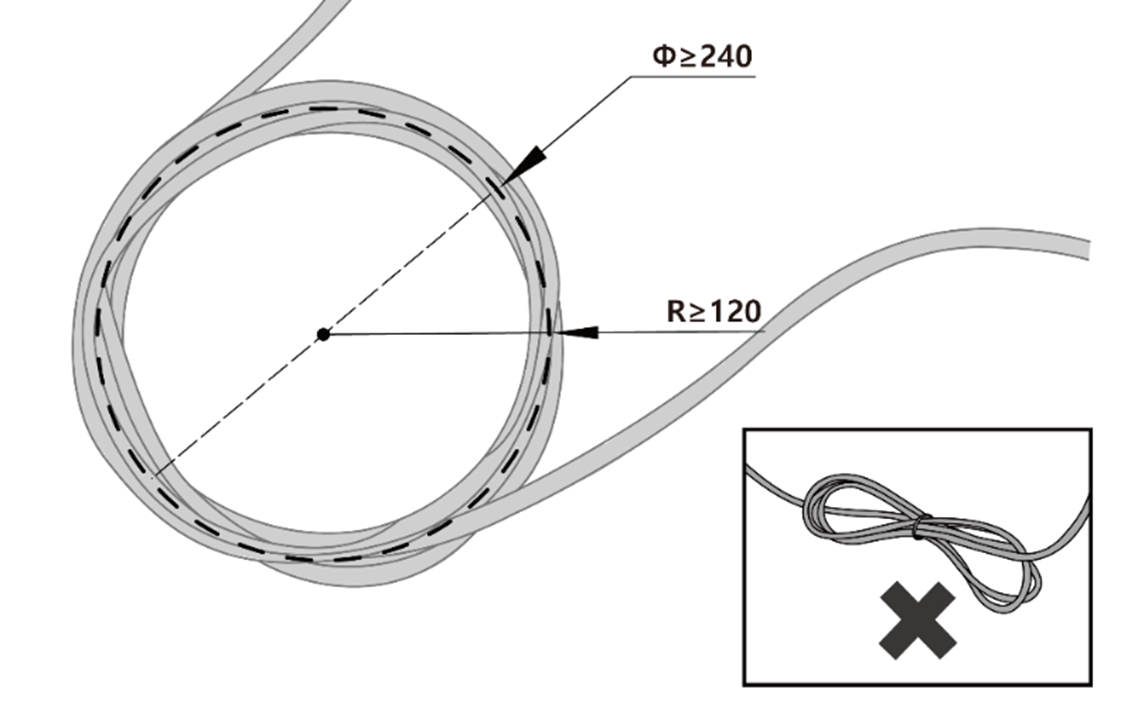
Cuidado
- Posicione a ligação em ambos os lados do cabo pendente de costura pelo menos tão reta quanto possível com um raio mínimo de curvatura (120 mm).
- Se o raio de curvatura for inferior ao raio mínimo de curvatura (120 mm), isto pode provocar uma falha do cabo ou do produto.
- Em ambientes onde possa ocorrer ruído eletromagnético, pode ser necessária a instalação adequada dos cabos e medidas para evitar possíveis avarias.
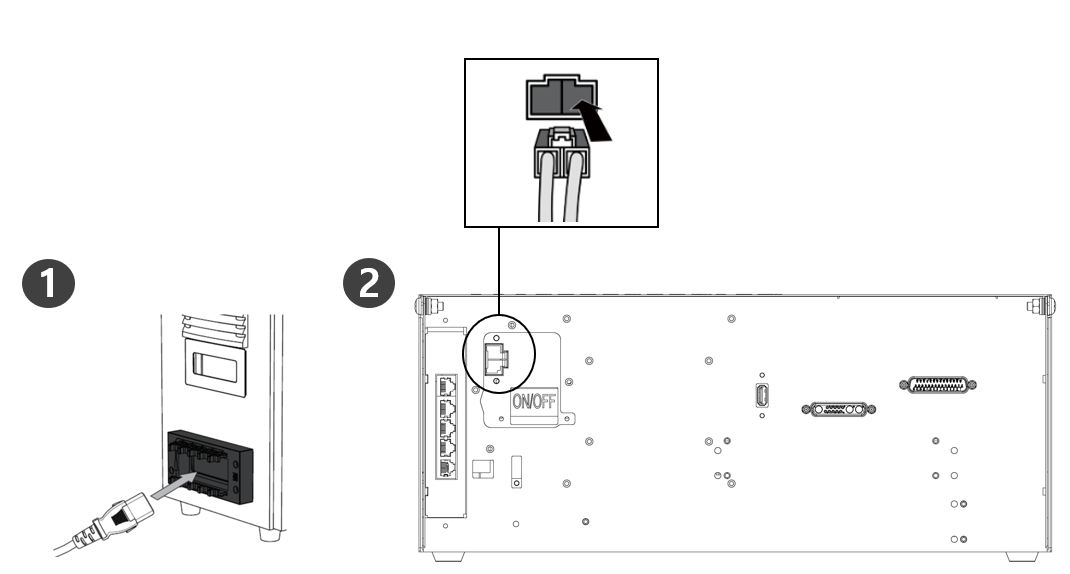
Ligar a alimentação do controlador
Certifique-se de que o cabo de alimentação não sai do caminho, encaixando-o na respetiva ligação no controlador.
Aviso
- Depois de ligar o cabo de alimentação, certifique-se de que o robot está corretamente ligado à terra (ligação à terra elétrica) Utilize os parafusos não utilizados associados ao símbolo de ligação à terra no controlador para fornecer uma ligação à terra comum para todos os equipamentos no sistema. Os condutores de terra devem ter uma corrente nominal da corrente mais alta no sistema no mínimo.
- Proteja a potência de entrada do controlador com um disjuntor de falha de terra, por exemplo.
- Não modifique nem estenda o cabo do robô. Pode ocorrer um incêndio ou o controlador pode falhar.
- Certifique-se de que todos os cabos estão ligados antes de ligar o controlador. Utilize sempre o fio correto fornecido.
- Certifique-se de que a polaridade da tensão de entrada não está invertida.
Saber
- Ao configurar o sistema, recomenda-se a instalação de um interrutor de alimentação que lhe permita desligar todo o equipamento de uma só vez.
- Ao utilizar um comando para DC, a carga e o movimento podem limitar o movimento do robô.
- Se a tensão de entrada for de 48 V ou inferior, a carga e o movimento podem restringir o movimento do robô.
- Os requisitos mínimos para a fonte de alimentação, taiscomo o interrutor de circuito de falha de terra e terra, devem ser cumpridos. As especificações elétricas estão listadas abaixo.
Parâmetros | Especificações |
Tensão de entrada | 22 – 60 VDC |
Corrente de entrada nominal | 30 A |