
Visão geral do ângulo de Euler
Ângulo de Euler é uma maneira de expressar os ângulos dos eixos X, Y e Z, que são perpendiculares entre si na direção do objeto. A, B e C referem-se aos ângulos de rotação sequencial. Cada fabricante de robôs define esta ordem De rotação A, B e C de forma diferente, como por exemplo Rz-Ry-Rz, Rz-Ry-Rx ou Rx-Ry-Rz.
Por exemplo, Rz-Ry-Rx. Aqui, Rz significa a rotação no eixo Z, Ry significa a rotação no eixo Y e Rx significa a rotação no eixo X. Rz pode ser expresso como ângulo A, Ry como ângulo B e Rx como ângulo C para indicar a direção de rotação atual de um objeto. Note-se que uma vez que a rotação é feita no sentido do eixo Z a partir das coordenadas, as rotações serão feitas com base nas novas coordenadas.
Isso pode ser visualizado com os passos 1 a 4.
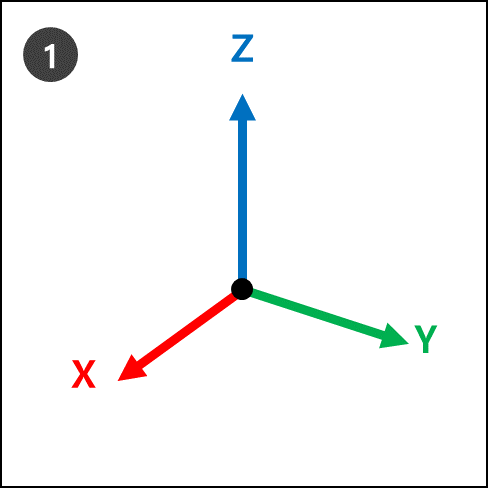
Suponha que haja coordenadas (X, Y, Z).
Rz: Rode por Um graus a partir do eixo Z.
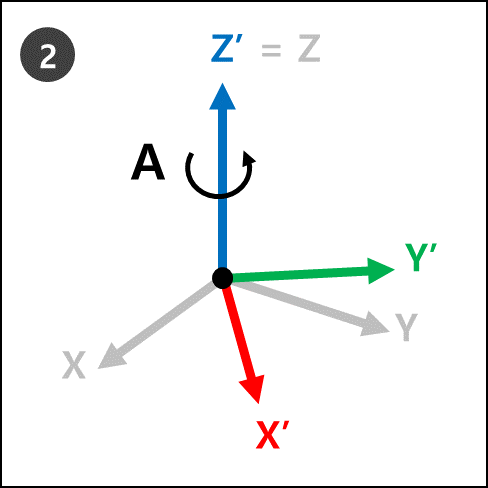
Ry : Gire por graus B a partir do novo eixo Y (Y') das novas coordenadas (X', Y', Z') no passo 2.
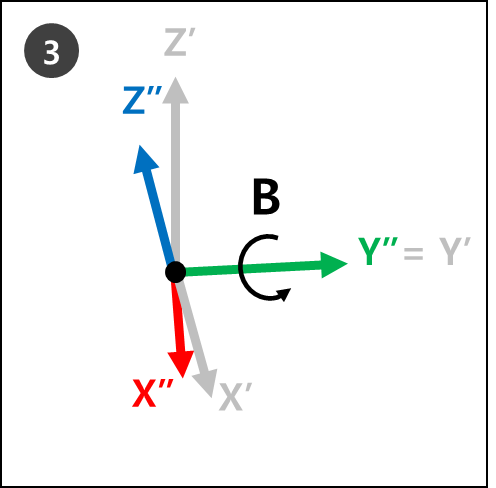
Rx : Gire por graus C a partir do novo eixo X (X'') das novas coordenadas (X', Y', Z'') no passo 3.
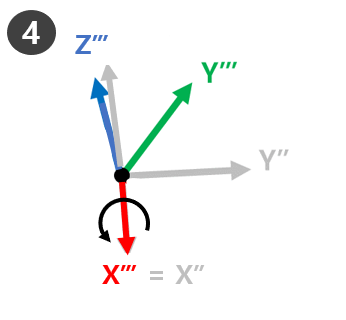
As novas coordenadas (Z''', Y''', X'' do passo 4 referem-se à rotação atual do robô quando os ângulos de Euler A, B e C são aplicados.
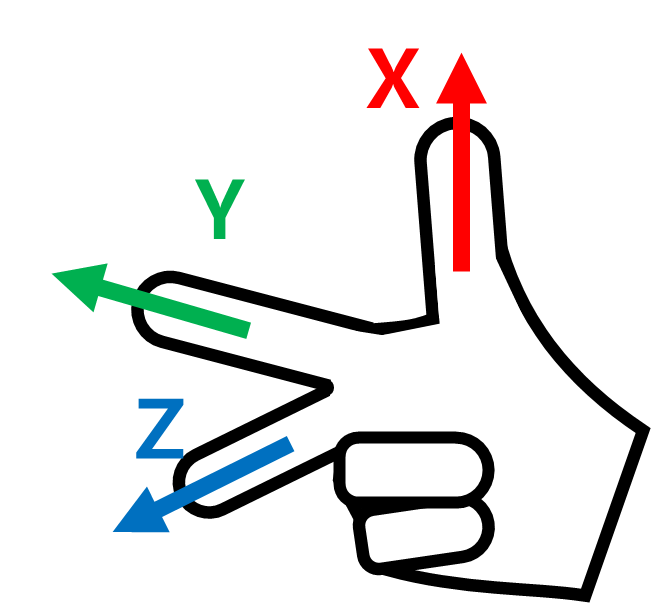
Isso pode ser facilmente visualizado com a mão direita. Faça a seguinte pose com a mão direita. Isso é chamado de Regra do lado direito, e fazer o polegar (eixo X), dedo indicador (eixo Y) e dedo médio (eixo Z) para ser perpendicular um ao outro criará coordenadas consistindo de eixos X, Y e Z.
Em seguida, faça a pose Cartesiana da Regra à direita e faça rotações Rz, Ry e Rx em ordem sequencial.
Rz: Rode o dedo médio (eixo Z) em graus.
Ry: Rode o dedo indicador (eixo Y) em graus B.
Rx: Rode o dedo médio (eixo X) em graus C.
Nota
A direção de rotação de A, B e C é a direção de quatro dedos, exceto o polegar, quando o polegar está apontando para a direção e os quatro dedos são cercados. Isto é chamado a lei do parafuso no sentido horário.
