
Visão geral da Singularidade
Singularidade em um robô multi-joint refere-se a uma posição (ou ponto) onde o robô tem dificuldade em calcular sua próxima pose durante a movimentação. Os robôs multiconjuntos calculam cada ângulo da junta durante o movimento com base na extremidade do robô
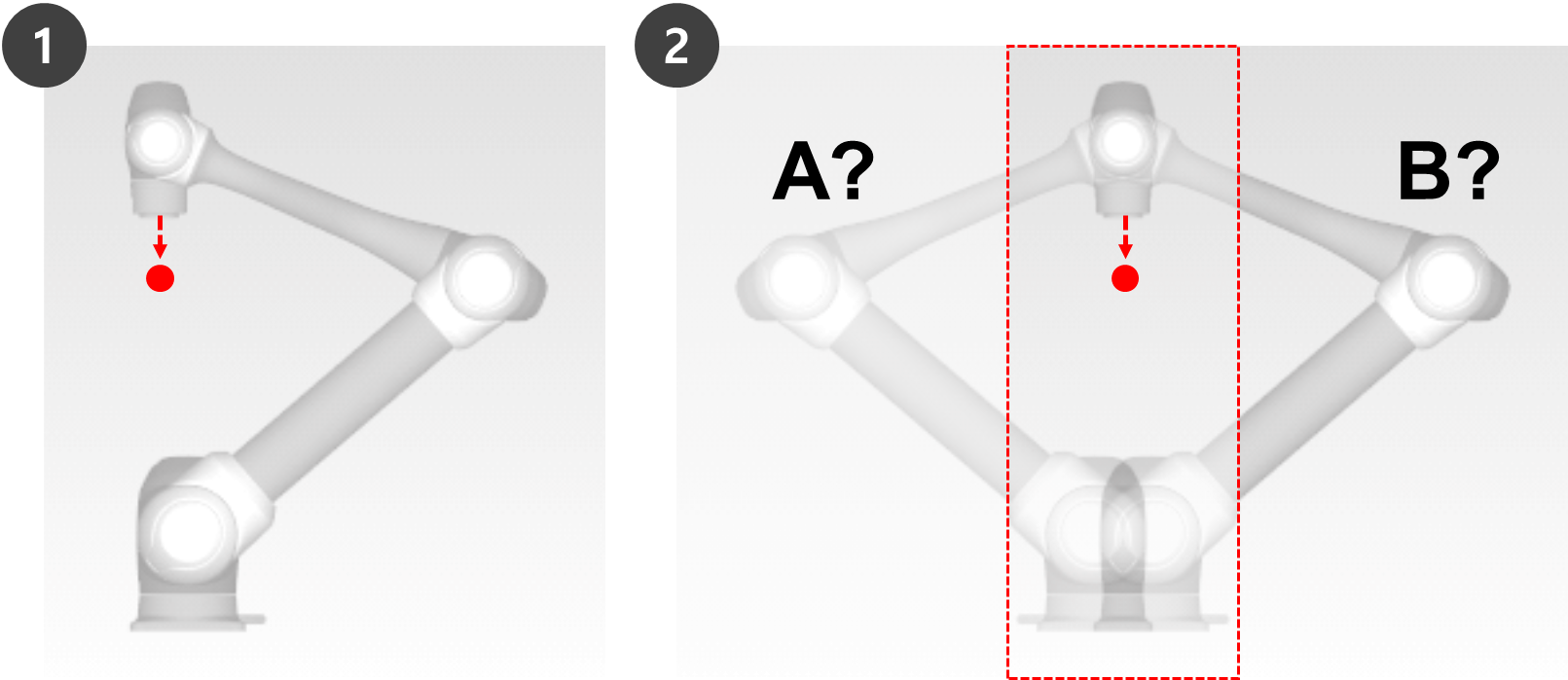
Por exemplo, na Fig. 1 Abaixo, quando o robô está se movendo para o ponto vermelho, o robô não será capaz de determinar se deve mover suas articulações para definir a pose A ou pose B como mostrado na Fig. 2. Esta posição (ou ponto) é chamada de singularidade.
Perto de uma singularidade, o movimento do robô não é fluido em termos de plano, ponto e linha, o movimento linear final do robô pode não ser mantido e o erro de posição durante o controle pode aumentar. A singularidade ocorre em três casos, como mostrado na figura a seguir, incluindo quando as juntas do robô formam uma linha.
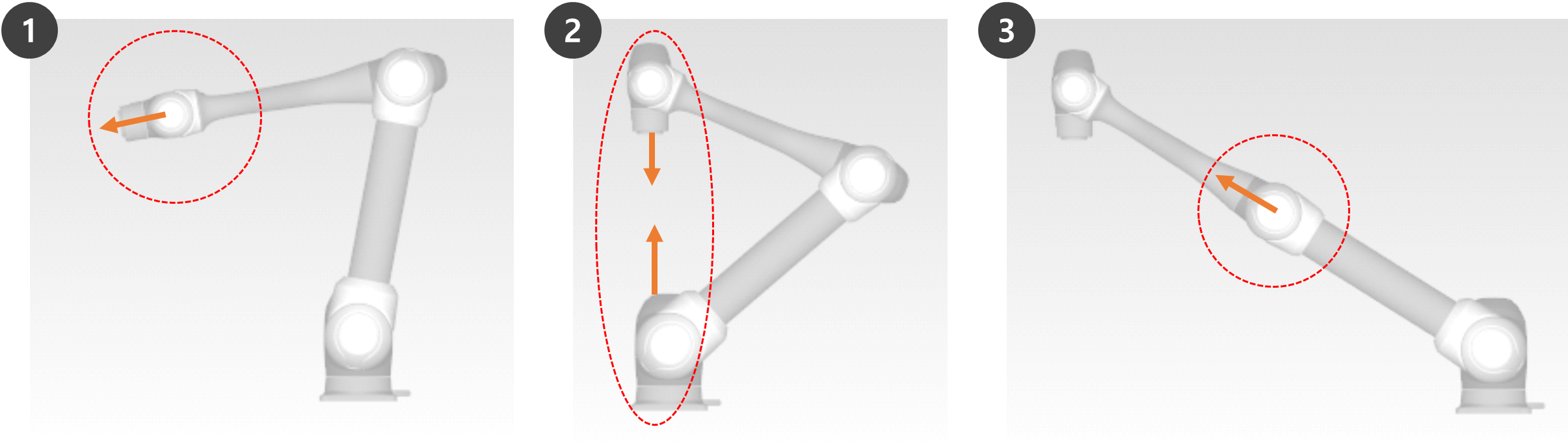
Singularidade do pulso: Quando o pulso do robô forma uma linha à medida que o Eixo 5 se aproxima de 0º
- Quando comparados a um braço humano, os eixos 4, 5 e 6 correspondem à articulação do pulso.
- Singularidade do ombro: Quando os eixos 1 e 6 estão na mesma linha
- Quando comparados a um braço humano, os eixos 1 e 2 correspondem à articulação do ombro.
- Singularidade do cotovelo: Quando o robô forma uma linha à medida que o Eixo 3 se aproxima de 0º
- Quando comparado a um braço humano, o Eixo 3 corresponde ao cotovelo.
Cuidado
As operações manuais e automáticas que se movem com rotação conjunta não são influenciadas pela singularidade.
- Movimento da tarefa, comando MoveL, etc.
- A singularidade só ocorre durante a operação manual e automática onde o robô termina realizando movimento linear.
- Movimento conjunto, comandos MoveJ, etc.
- Na zona de singularidade, o controle de força ou o controle de conformidade não estão disponíveis.
- À medida que a velocidade de rotação de certos eixos aumenta rapidamente quando um movimento linear passa por uma singularidade, é possível que ocorra uma violação do limite de velocidade conjunta ou violação do limite de ângulo da junta.
Como evitar a Singularidade
Os robôs Doosan Robotics oferecem opções para evitar singularidades durante o controle de movimento. No entanto, recomenda-se configurar uma tarefa que não crie exceções usando comandos de movimento conjunto, como o MoveJ em zonas de singularidade.