Visão geral do conceito de Compliance/Controle de Força do Comando Editor de Tarefas
OPCIONAL DIFÍCIL 20 MIN
Controle de Força e Controle de Conformidade são funções que controlam a força do robô. Além disso, com a adição de comandos de movimento, a força pode ser controlada ao mesmo tempo que o movimento é feito. O Controle de Conformidade e o Controle de Força têm as seguintes diferenças, respetivamente.
- Controle de conformidade
- No caso do Controle de Conformidade, o robô cumpre a força externa no TCP final do robô e quando a força externa é removida, uma força é gerada para mover o robô de volta para onde ele deve estar.
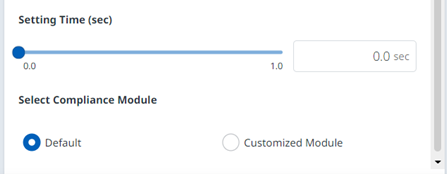
- Esta abordagem pode ser utilizada quando um robô está se movendo em linha reta em uma superfície acidentada e você quer garantir que o robô se mova sem causar danos a si mesmo ou à superfície. Isso também pode ser utilizado para evitar colisões inesperadas perto de peças de trabalho.
- Controlo de força
- No caso do Controle de Força, a força é aplicada ao TCP no final do robô. A aceleração é gerada na direção em que a força é gerada, fazendo com que o robô se mova simultaneamente na direção da força, além da direção do movimento.
- Quando o robô entra em contato com um objeto, a força é aplicada ao objeto até que a força definida e a força repulsiva do objeto estejam em equilíbrio.
- Esta abordagem pode ser utilizada quando um robô está se movendo em uma linha reta em uma superfície acidentada e você quer garantir que uma força constante seja aplicada a uma superfície. Isso também pode ser utilizado para tarefas que exigem que o robô empurre com uma força constante, ou seja, trabalho de polimento.
Nota
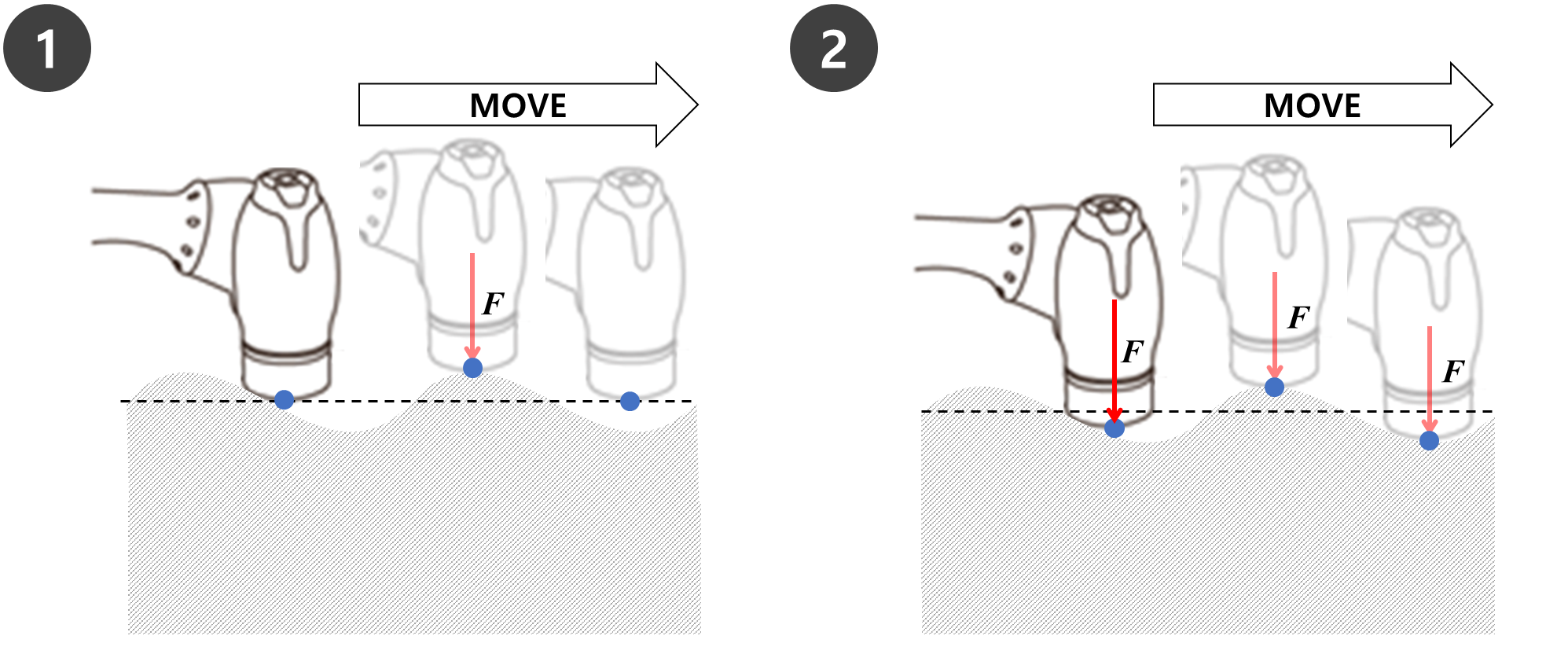
Os comandos Compliance e Force são executados com base nas coordenadas atuais. A coordenada padrão de uma tarefa é as coordenadas Base e as coordenadas podem ser alteradas com o comando SET.
- Fig. 1 é a direção de operação quando o controle de força/conformidade na direção de -Z é aplicado nas coordenadas base.
- Fig. 2 é o sentido de funcionamento quando o controlo de força/conformidade na direção de V-Z é aplicado nas coordenadas da ferramenta.
Controle de conformidade
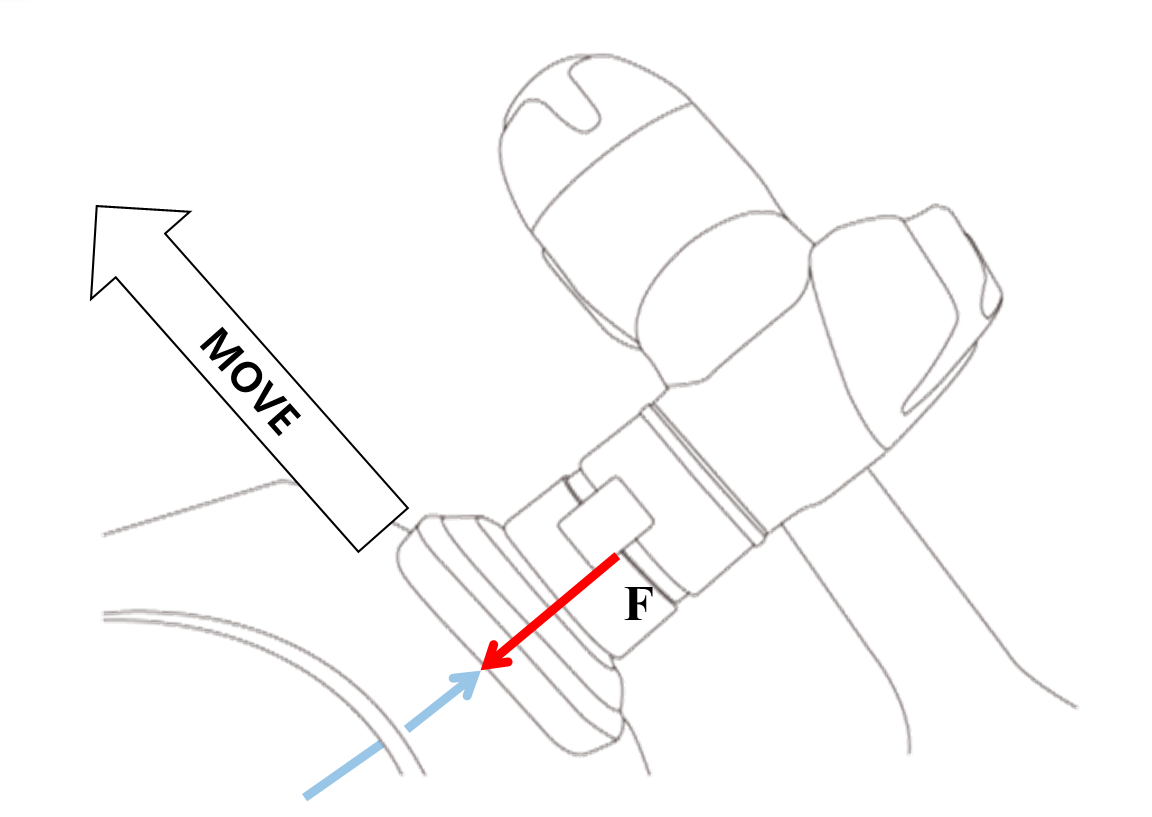
O controle de conformidade é a função que cumpre a força externa de acordo com a rigidez definida quando a força é aplicada no TCOP no final do robô. Ele equilibra forças no ponto alvo, e é um método de controle que gera força de repelência se o deslocamento ocorrer longe do ponto de equilíbrio. Durante o controle de conformidade, a extremidade do robô salta como uma mola.
- Se a colisão for feita quando o controlo de movimento é usado sozinho, é possível que o objeto colidido possa ficar danificado.
- Os robôs Doosan Robotics param em segurança quando ocorre uma colisão, mas dependendo da configuração do usuário, como Limites de segurança > Sensibilidade de colisão, as seguintes situações podem ocorrer.
- Se o controlo de conformidade estiver definido para LIGADO durante o controlo de movimento, o robot desloca-se enquanto cumpre o objeto colidido.
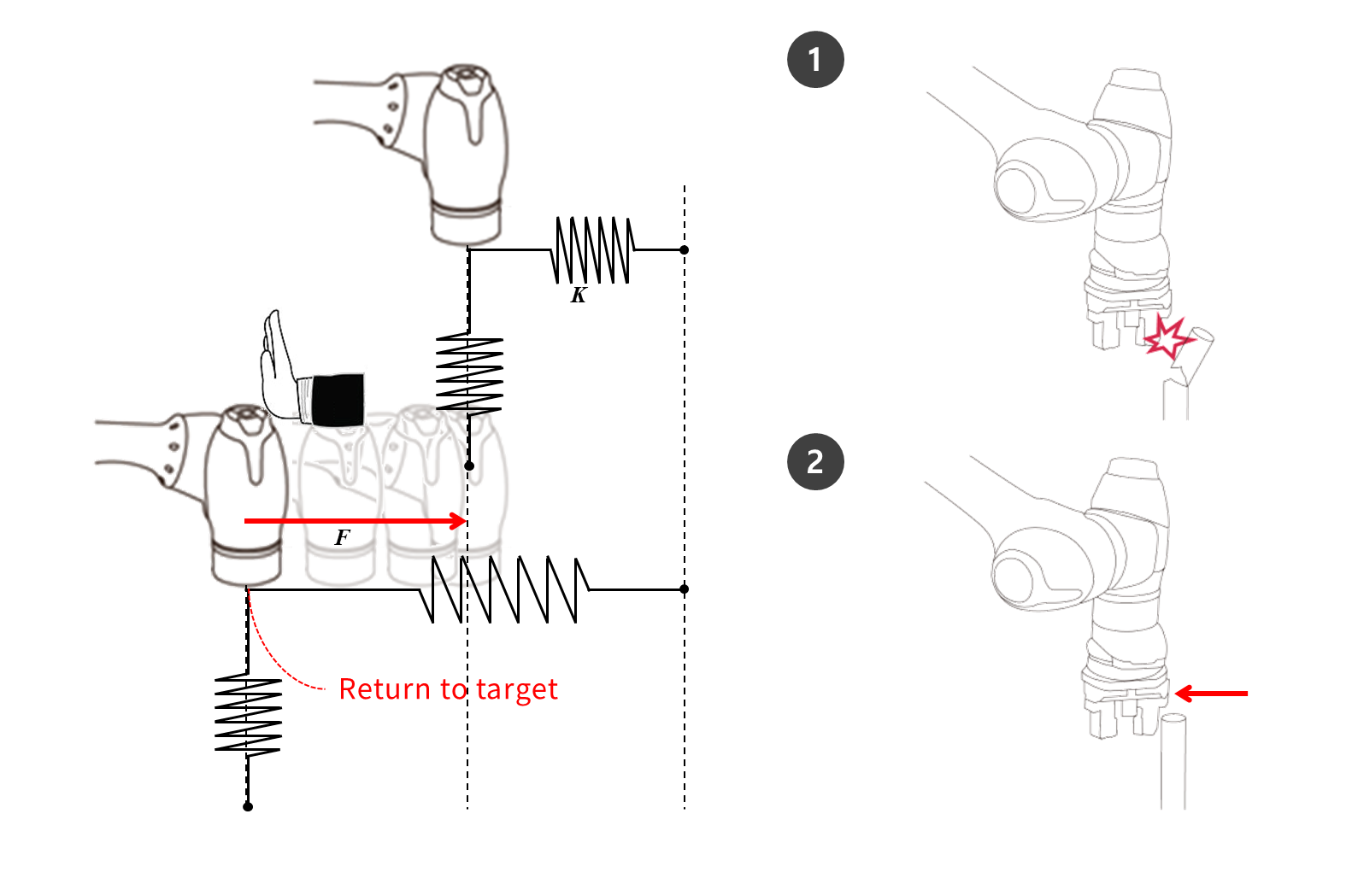
Se F é força externa, K é rigidez e X é distância, as seguintes fórmulas são verdadeiras.
- F: K * X
- K: F / X.
- X: F / K
Com base nas fórmulas acima, se a rigidez do controle de conformidade estiver definida para 1000N/m e se o robô se mover 1 mm, a força externa gerada é 1N.
- 1000 N/m*0,001 m-1 N (0,001 m-1 mm)
Nota
Na propriedade do Comando de Conformidade, os seguintes valores podem ser definidos:
- Modo
- Ligado: Permite o controle de conformidade
- Alterar: Se o modo de conformidade estiver definido como LIGADO, muda para rigidez
- Desligado: Desativa o controle de conformidade
- Faixa de rigidez
- Série M/H: Tradução (0-20000N/m), rotação (0-1000Nm/rad)
- Série A: Tradução (0-10000N/m), rotação (0-300Nm/rad)
- Valores de rigidez mais baixos responderão à força externa com mais cuidado e exigirão mais tempo para retornar ao ponto alvo
- Definir a hora
- É o tempo necessário para que o valor de rigidez atual atinja o valor de rigidez definido (0-1s)

Cuidado
- O peso da ferramenta e o TCP (ponto central da ferramenta) devem ser definidos com precisão. O peso impreciso da ferramenta pode fazer com que o robô detete o peso da ferramenta como força externa, e definir o comando de conformidade ON gerará erro de posição.
- A tensão do vestido pode gerar torque externo no robô. Portanto, tenha cuidado ao instalar o conjunto de roupas.
- A conformidade não pode ser ativada ou desativada enquanto o movimento assíncrono ou o movimento de mistura estiver sendo executado.
- Durante o comando de conformidade ligado, apenas é permitido movimento linear. Não são permitidas moções conjuntas, como o MoveJ e o MoveSJ.
- Durante o Comando de Conformidade Ligado, o Peso da Ferramenta ou o TCP não podem ser alterados.
- Durante o comando de conformidade ligado, é possível não alcançar com precisão o ponto-alvo devido à conformidade do binário gerado durante a execução do movimento. Portanto, recomenda-se ativar o controle de conformidade perto do ponto-alvo. Ou, é possível minimizar o erro de posição definindo um grande valor de rigidez.
Controlo de força
O controlo de força é uma função que aplica a força na direção de controlo de força até que a força definida e a força de repelência sejam equilibradas
- Ele move o robô na direção de força definida e, se o contato com um objeto for feito, ele mantém a força inserida (N)
- É capaz de controle de movimento em uma direção diferente da direção de força ao aplicar uma força constante
- A configuração mínima é de 10N, e pode ser ajustada com uma resolução de 0.2N
- O controlo de força não está disponível na zona de singularidade
- Em geral, o Controle de Conformidade é usado em conjunto com o controle de força para que o controle de força esteja em conformidade com a força externa
Nota
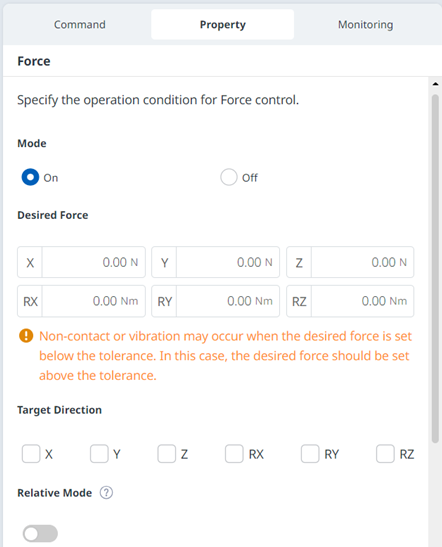
A partir da propriedade Force Command, os seguintes valores podem ser definidos.
- Modo
- Ligado: Ativa o controlo de força
- Desligado: Desativa o controlo de força
- Intervalo de força pretendido
- X, Y, Z: 10 - (máximo de cada robô) N
- A, B, C: 5 - (máximo de cada robô) Nm
- Para obter mais informações sobre a força máxima, consulte Parâmetros de segurança gamas inferiores e inferiores e valores predefinidos.
- Direção alvo
- Move-se para o valor alvo selecionado de cada direção.
- Várias seleções podem ser feitas.
- O controlo de força só pode ser executado com a definição de direção após a definição de força.
- Se uma das várias direções selecionadas atingir a força-alvo, ela continuará a se mover até que o valor-alvo seja atingido para a outra direção.
- Modo relativo
- Se este modo estiver ativado, calibra a força externa aplicada no robô para 0 para melhorar a precisão do controle de força.
- Quando o modo relativo é desativado, a força real aplicada no alvo é igual à soma da força definida e da força externa.
- Quando o modo relativo está ativado, a força real aplicada no alvo é igual à força definida.
- Durante o controle de força, o desvio pode ocorrer dependendo da pose ou da força externa.
- Durante o controle de força, é possível não alcançar o ponto-alvo exato. Portanto, recomenda-se ativar o controle de força perto do ponto-alvo.
- Se este modo estiver ativado, calibra a força externa aplicada no robô para 0 para melhorar a precisão do controle de força.
- Definir a hora
- É o tempo necessário para que o valor de força atual atinja o valor de força definido (0-1s)