
Ligação de E/S do controlador
Os terminais de E/S do controlador podem ser usados para conetar equipamentos externos que não manipuladores e ensinar o pendente ao controlador. Além de dispositivos de segurança, como interrutor de parada de emergência, cortina de luz e tapetes de segurança, vários periféricos necessários para configurar uma célula de trabalho de robô, como válvulas solenoides pneumáticas, relés, PLC e encoders de correia transportadora podem ser conetados.
A E/S do controlador está organizada da seguinte forma.
- Bloco de terminais para entrada de contacto de segurança (TBSFT): Para ligar dispositivos necessários para paragem de emergência e paragem de proteçãoão
- Bloco de terminais de alimentação de E/S digitais (TBPWR)
- Bloco de E/S digital configurável (TBCI1- 4, TBCO1– 4): Para ligar periféricos necessários para a operação do robô
- Bloco de terminais de E/S analógicos (TBAIO)
- Bloco de terminais para entrada do codificador (TBEN1, TBEN2)
- Bloco de terminais para saída de contacto de segurança (TBSTO): Para ligar à linha de alimentação dos periféricos do robô e parar o robô quando este entra no estado STO, cortando também a alimentação dos periféricos
A figura abaixo mostra a disposição da interface elétrica no interior do controlador.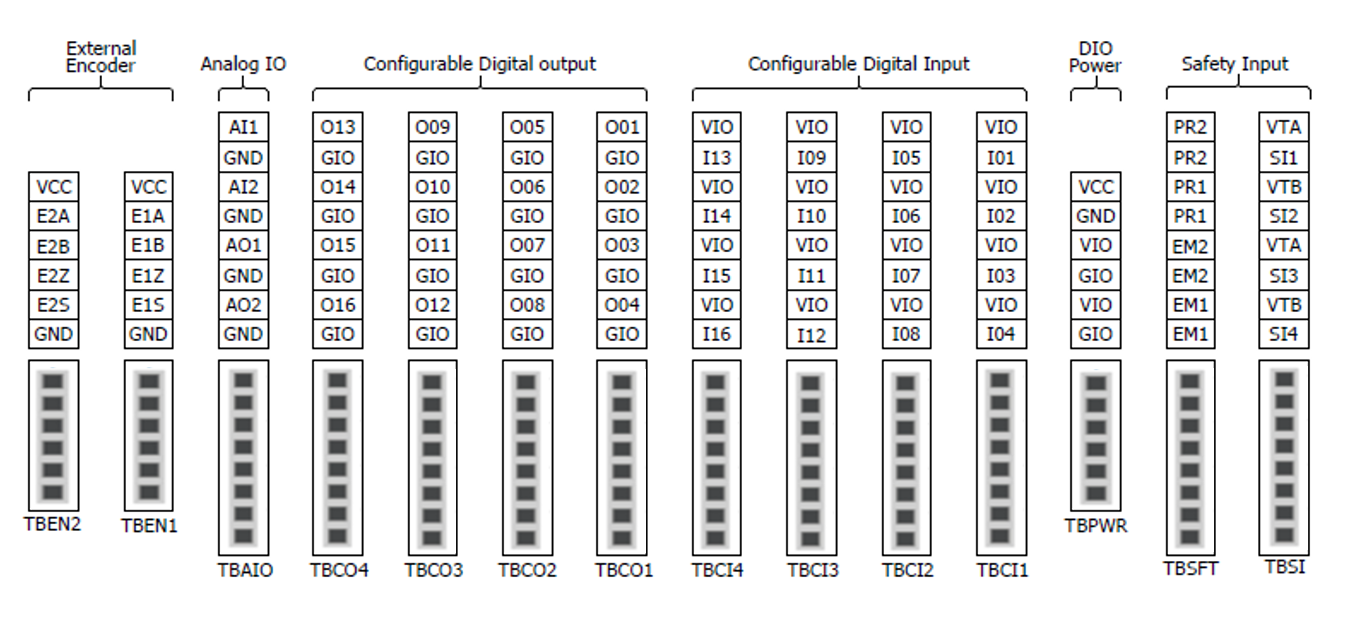
Cuidado
- Para evitar o risco de danos e mau funcionamento do produto, certifique-se de desligar a alimentação ao ligar terminais à E/S do controlador
- A Doosan Robotics não compensará qualquer dano ao produto devido a conexão inadequada de terminais ou negligência do usuário.
- Ao desligar a alimentação do controlador, certifique-se de desligar também a fonte de alimentação externa.