Para mover o robô em relação às ferramentas do robô, faça o seguinte:
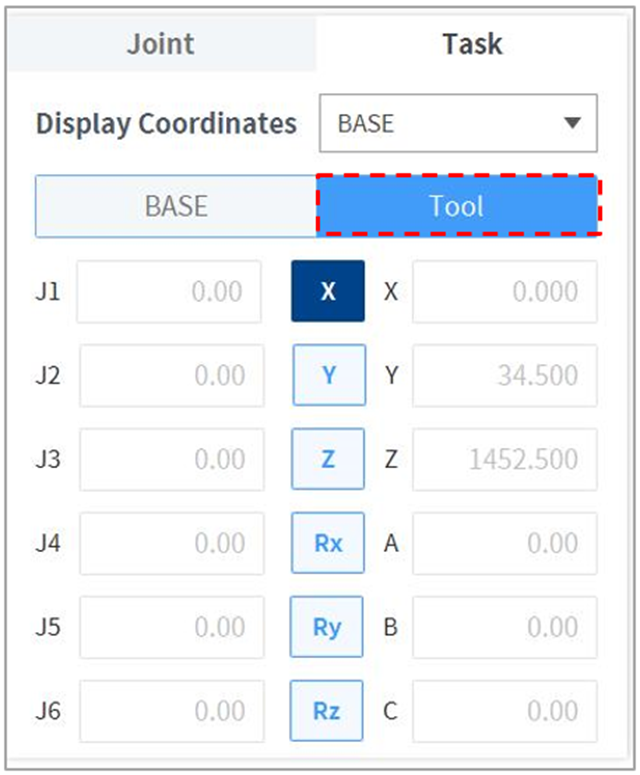
Selecione a guia Tarefas na tela Jog.
Selecione Base ou Mundo como o sistema de coordenadas de exibição e defina a ferramenta como o ponto de referência do sistema de coordenadas da tarefa.
Selecione o sistema de coordenadas da ferramenta que pretende mover.
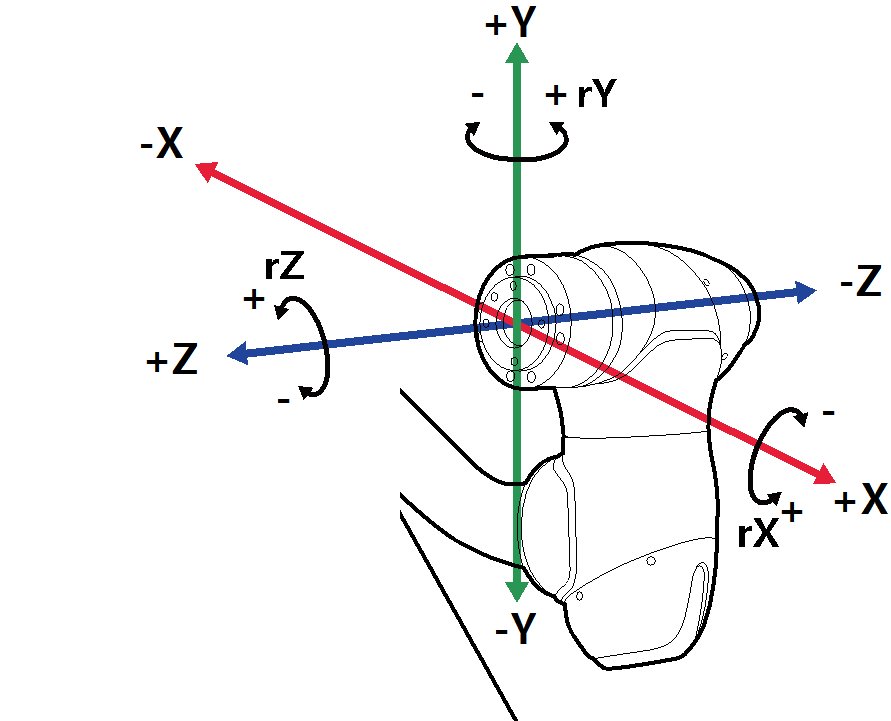
Prima e mantenha premidos os botões de direção (,)para mover o eixo correspondente.
Saber
A zona de segurança não é aplicável no modo virtual.
RX, ry e RZ são executados em uma base TCP (Tool Center Position).
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.