
Configuração do robô
O ecrã Robot Setup (Configuração do Robô) é composto por:
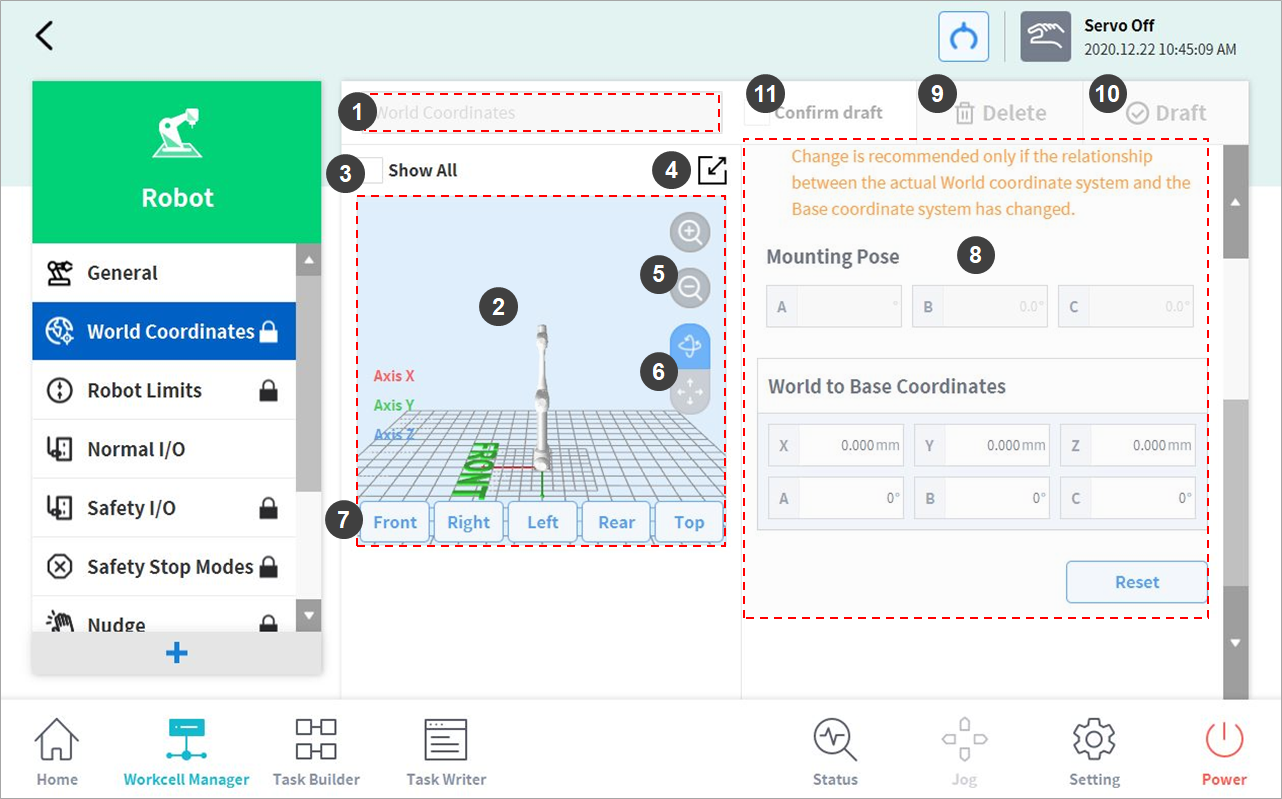
Número | Item | Descrição |
|---|---|---|
1 | Introduza o nome da célula de trabalho | Introduza um nome para a célula de trabalho. |
2 | Ecrã de simulação | Apresenta uma simulação do espaço de funcionamento da célula de trabalho. |
3 | Zoom para ajustar | Pode visualizar todas as outras células de trabalho registadas. Marque a caixapara ativar o recurso Exibir tudo. Quando desmarcada, o recurso é desativado novamente. |
4 | Transições máximas de tela | O ecrã de simulação muda para o ecrã completo. |
5 | Ampliar | Ampliaou reduz o ecrã de simulação. |
6 | Rodar | Rode ou desloque o ecrã de simulação na direção pretendida. Toque em qualquer botão e , em seguida, arraste ou toque no ecrã para o controlar. |
7 | Defina a orientação do simulador | Define a orientação do simulador. Apresenta a simulação na direção selecionada. |
8 | Espaço de funcionamento | Apresenta o espaço de trabalho da célula de trabalho. |
9 | Eliminar | Elimina a célula de trabalho atualmente ativa. |
10 | Guardar para mais tarde OK | Guardar para mais tarde: Guarda temporariamente as definições do espaço de funcionamento da célula de trabalho. Confirmar: Guarda as definições de espaço de funcionamento da célula de trabalhoem que está a trabalhar ou confirmou uma gravação temporária. (O botão Confirm Temporary Storage (Confirmar armazenamento temporário) é apresentado apenas para células de trabalho relacionadas com a segurança e apenas o botão OK é apresentado para células de trabalho normais. |
11 | Confirmar armazenamento temporário | Confirme as definições temporárias do espaço de funcionamento guardado para armazenamento final. (Apenas para células de trabalho relacionadas com a segurança, não para células de trabalho normais. |





