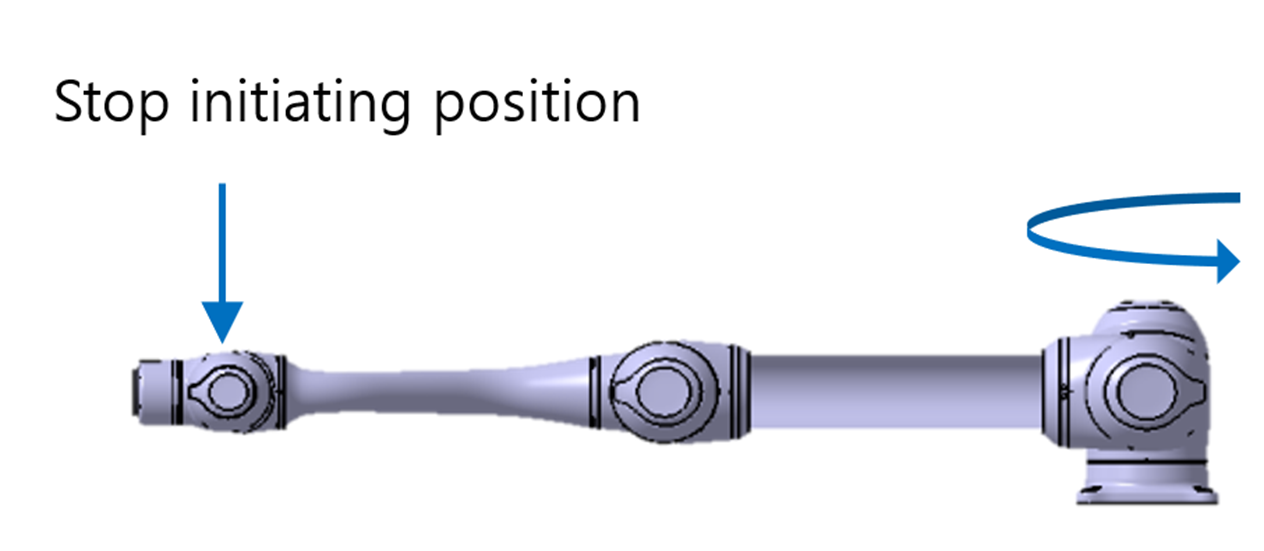
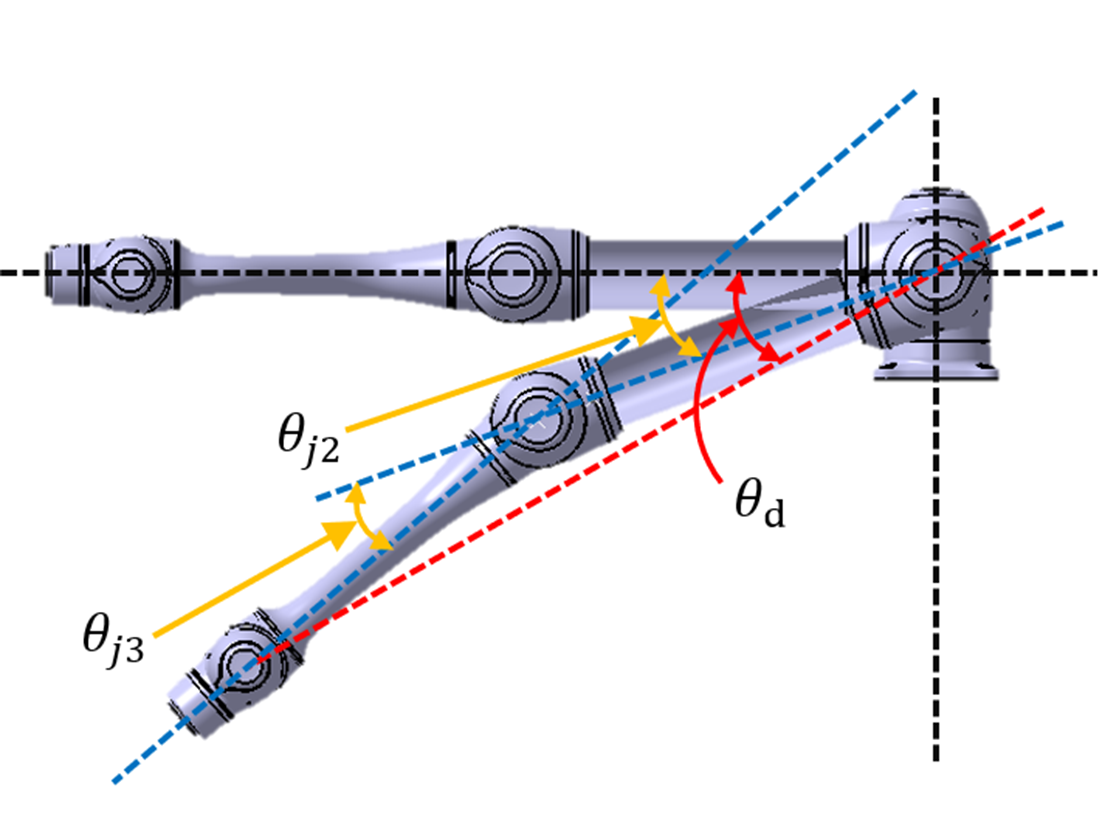
As medidas da articulação 1foram realizadas durante o movimento horizontal com o eixo de rotação perpendicular ao solo.
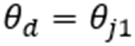
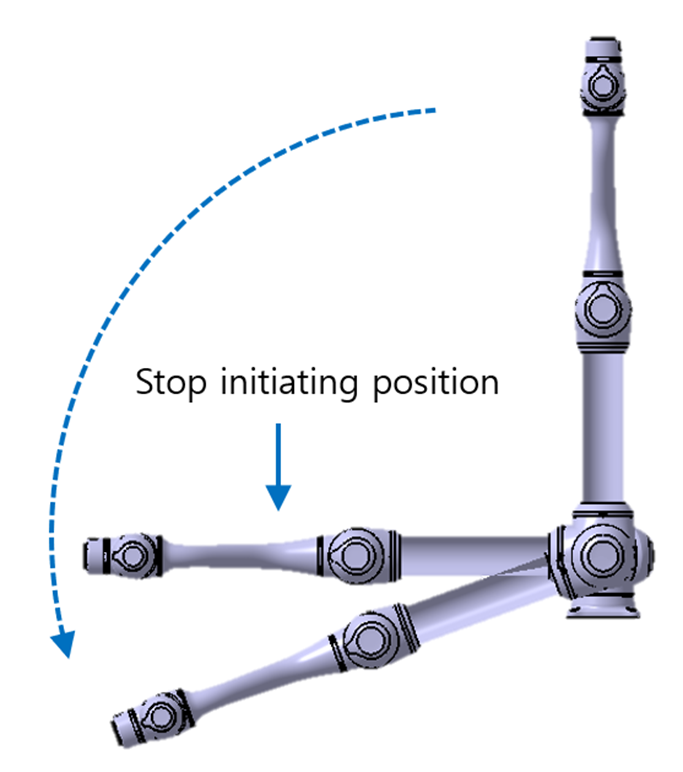
As medidas da articulação 2 e da articulação 3foram feitas parando-se o robô movendo-se para baixo o caminho perpendicularao solo com o eixo rotacional paralelo ao solo.
Saber
Estas medições são efetuadas nas piores condições possíveis. Pode variar consoante as condições de medição.
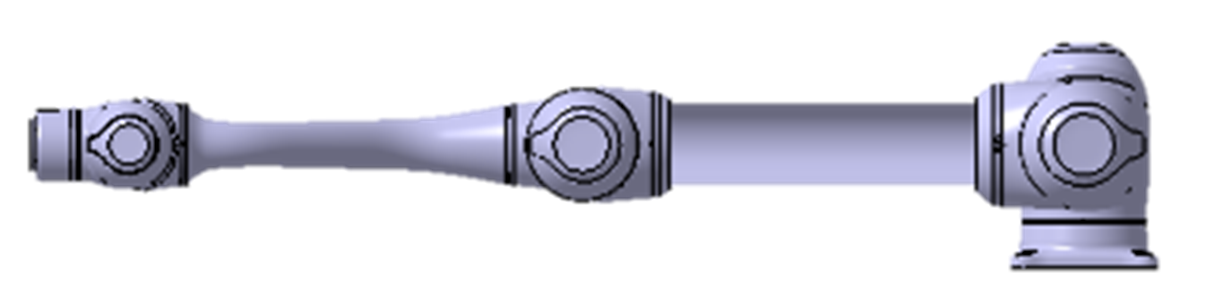
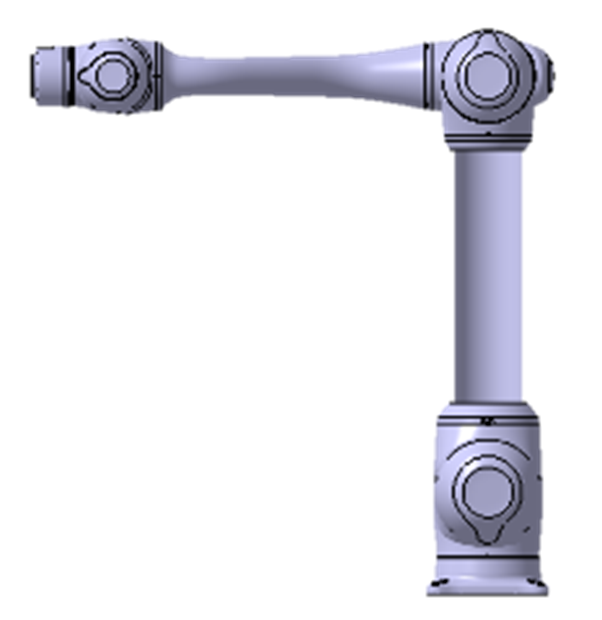
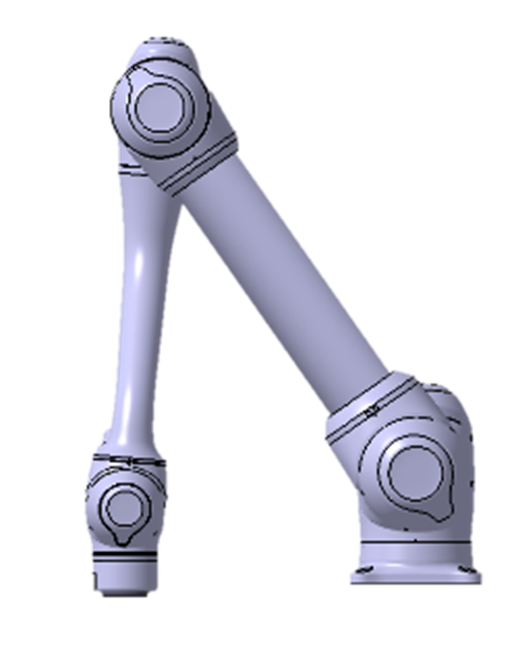
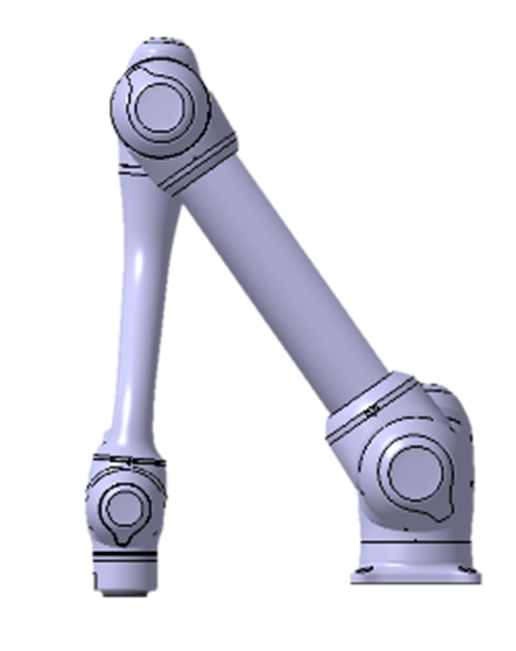
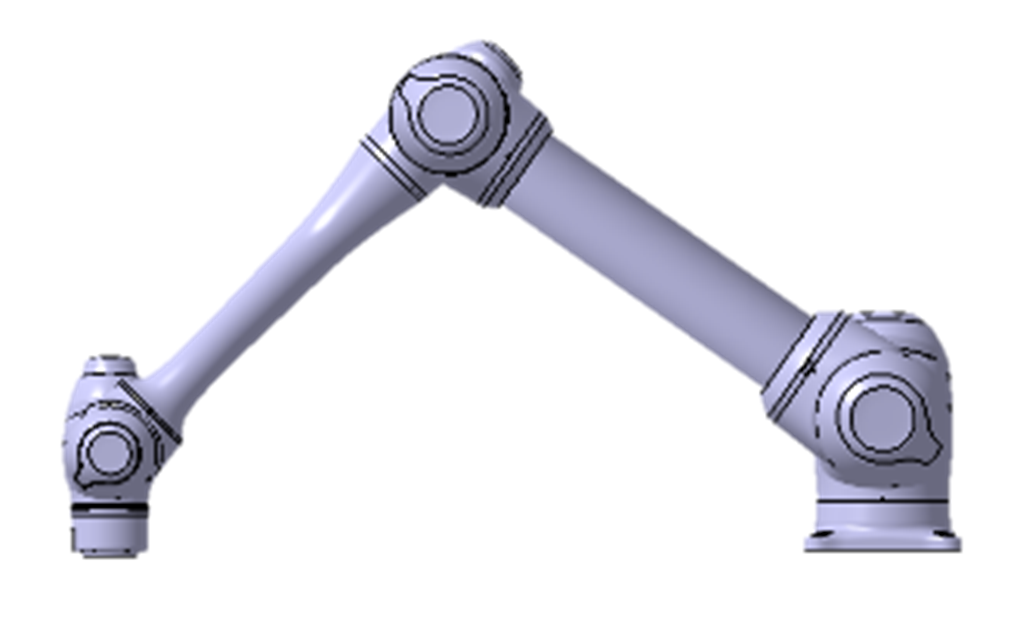
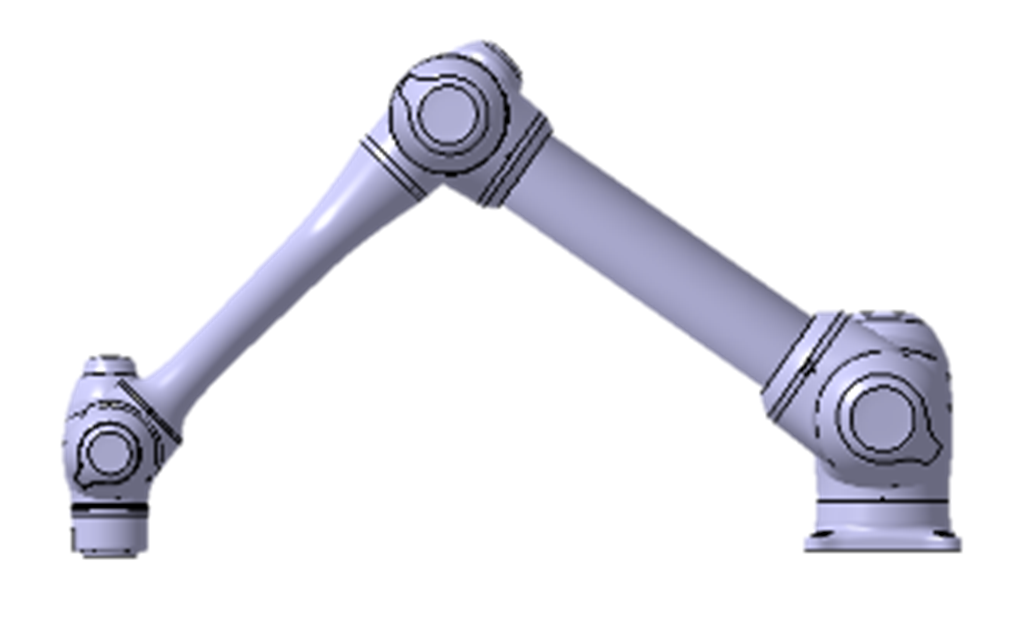
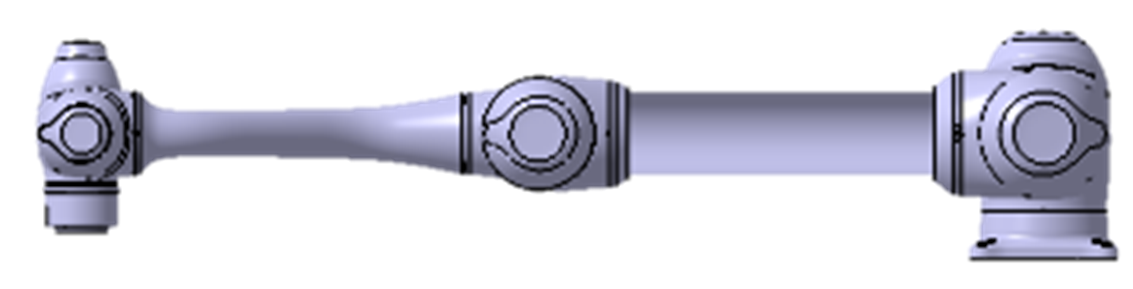
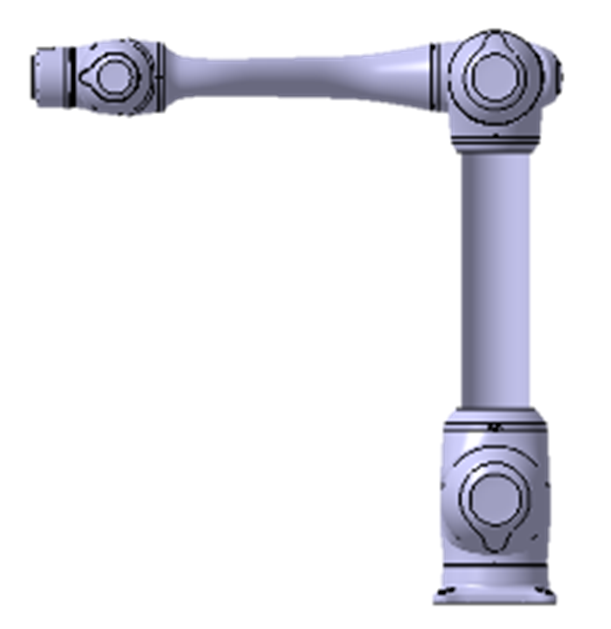
The pose for 33%, 66%, and 100% of extension
Joint 1
Joint 2
Joint 3
100% extension
Stop category 0
33% extension
Stop category 1
-
66% extension
Stop category 1
-
100% extension
Stop category 1
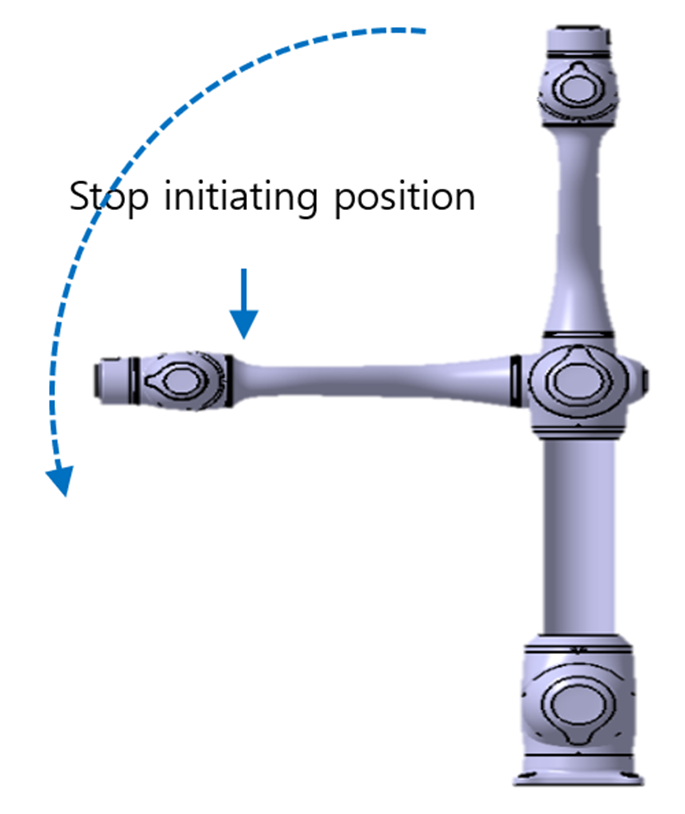
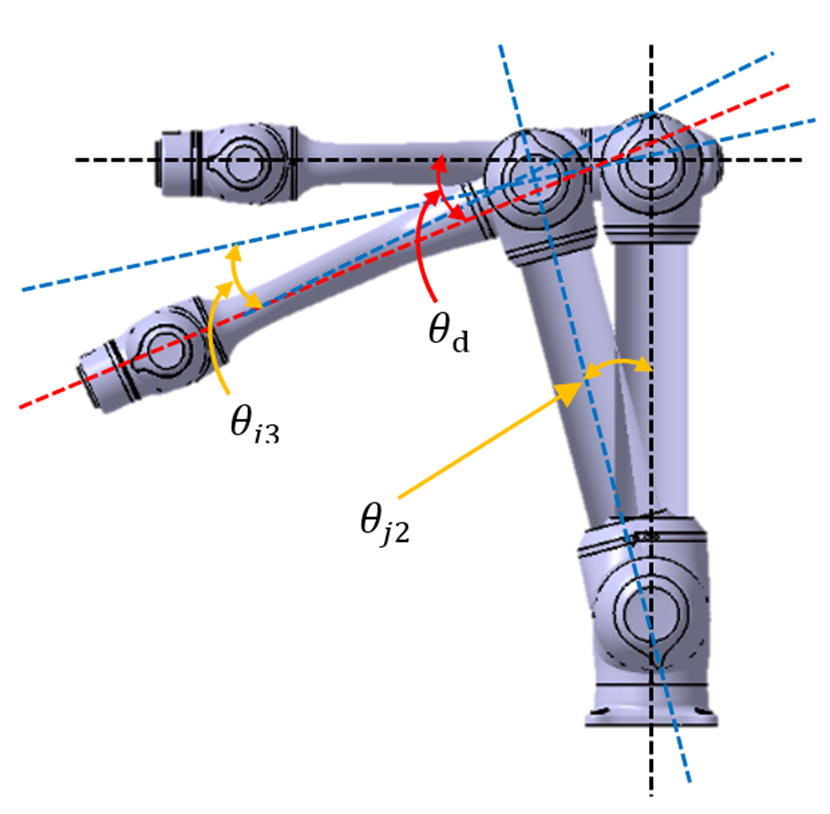
The pose when the stop is initiated and the measured angle ()
Pose when the stop is initiated
Measured Angle
Joint1
No slip,
Joint2
Joint3
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.