
O máximo está sendo ponderado na área de trabalho
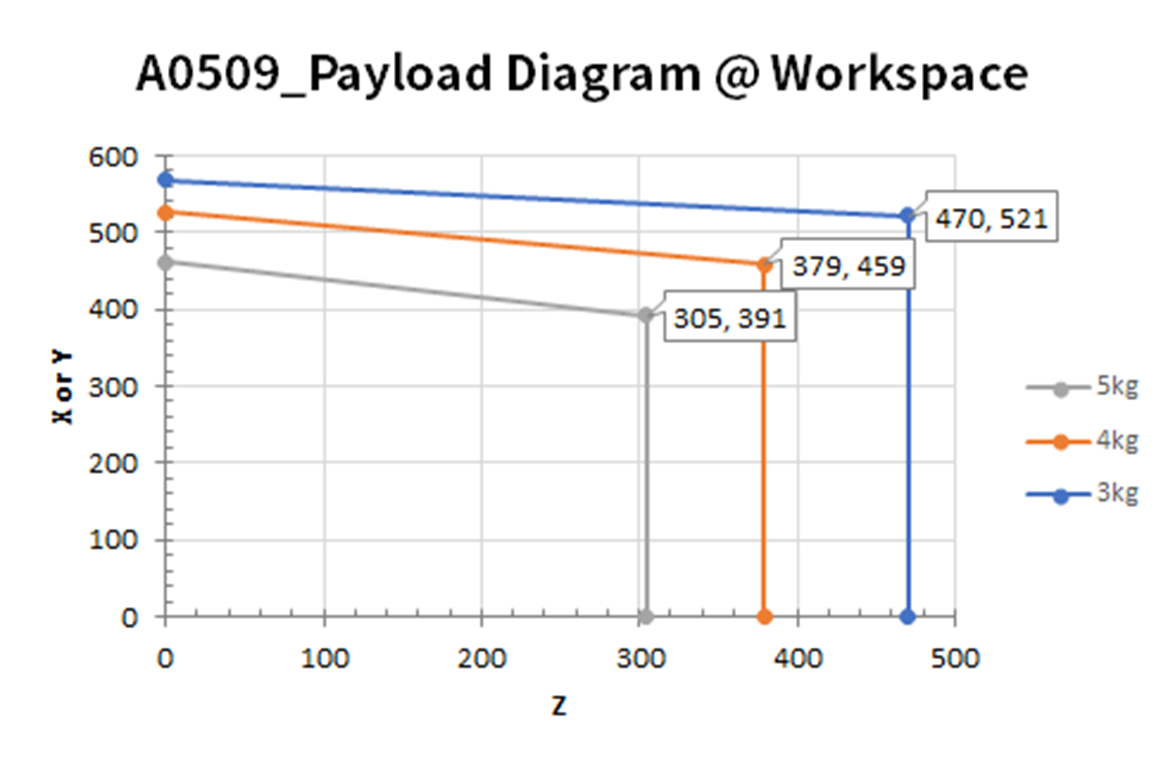
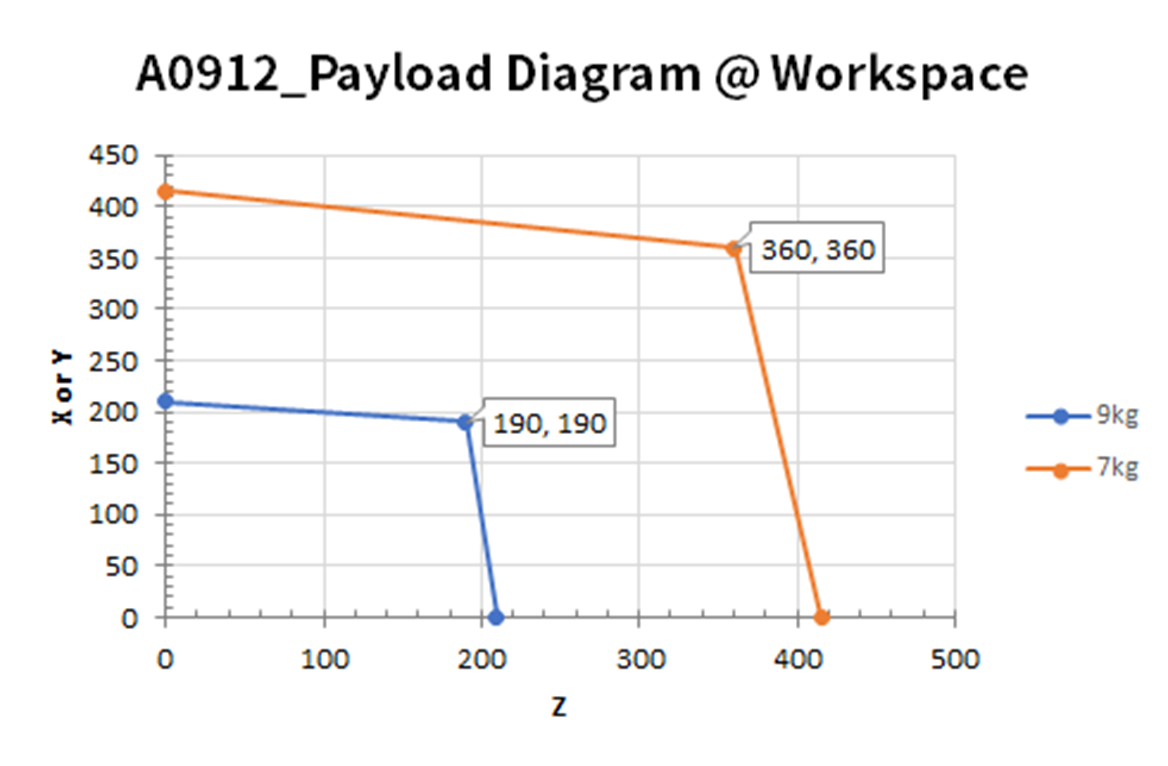
O peso máximo do robot dentro da área de trabalho depende da distância do centro de gravidade. A seguinte é a força de reação a cada distância:
Saber
Este diagrama de esforço assume um pequeno volume de carga da ferramenta. Mesmo as ferramentas com o mesmo peso têm um grande volume de carga, o centro de gravidade da ferramenta pode ser mais restrito do que o contador com peso acima, podendo causar vibração, etc.
A0509
A0912
Momento e inércia permitidos
Os momentos e informações de inércia permitidos para o robô de J4 a J6 são mostrados abaixo.
| Nome do modelo | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
| Momentos permitidos | Inércia | Momentos permitidos | Inércia | Momentos permitidos | Inércia | |
A0509 | 50 Nm | 0.69 kg㎡ | 50 Nm | 0.69 kg㎡ | 50 Nm | 0.69 kg㎡ |
A0912 | ||||||
A0509s | 11 Nm | 0.15 kg㎡ | 11 Nm | 0.15 kg㎡ | 11 Nm | 0.15 kg㎡ |
A0912s | ||||||