
Ligar a alimentação do controlador
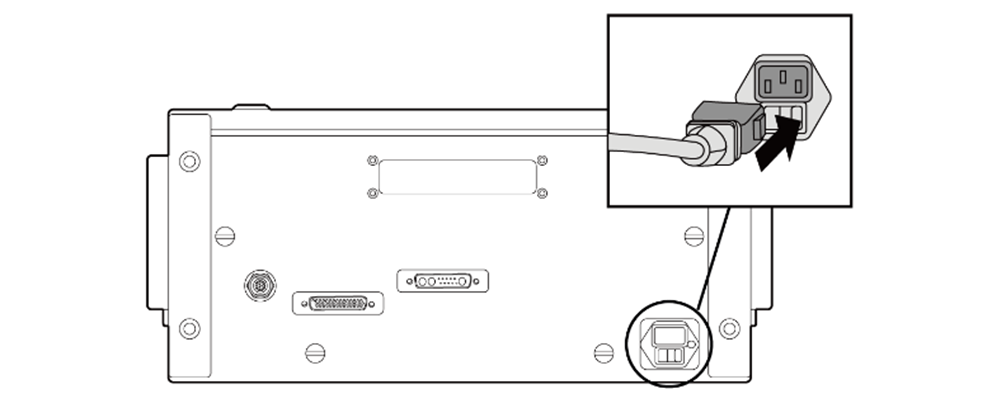
Para ligar a alimentação ao controlador, ligue o cabo à ficha de alimentação IEC padrão.
- Para ligação, utilize o cabo com a ficha de alimentação padrão do seu país.
- Certifique-se de que a ficha de alimentação está totalmente ligada à ligação adequada no controlador para evitar que caia. Ligue a ficha IEC C14 padrão por baixo do controlador ao cabo IEC C13 correspondente.
Cuidado
- Depois de ligar o cabo de alimentação, certifique-se de que o robot está corretamente ligado à terra(ligação à terra elétrica) Utilize os parafusos não utilizados associadosao símbolo de ligação à terra no interior do controlador para fornecer uma ligação à terra comum para todos os equipamentos no sistema. Os condutores de terra devem ter uma corrente nominal da corrente mais alta no sistema no mínimo.
- Proteja a potência de entrada do controladorcom um interrutor de falha de terra.
- Não tente modificar ou estender o cabo de alimentação. Pode ocorrer um incêndio ou o controlador pode falhar.
- Certifique-se de que todos os cabos estão ligadosantes de ligar o controlador. Utilize sempre o fio correto fornecido.
Saber
- Ao configurar o sistema, recomenda-se a instalação de um interrutor de alimentaçãoque lhe permita desligar todo o equipamento de uma só vez.
Os requisitos mínimos para a fonte de alimentação, taiscomo o interrutor de circuito de falha de terra e terra, devem ser cumpridos. As especificações elétricas estão listadas abaixo. (Para controladores opcionais, consulte os respetivos apêndices.
- Se a tensão de entrada for inferior a 180 V, a carga e o movimento podem restringir o movimento do robô.
Parâmetros | Especificações |
|---|---|
Tensão de entrada | 100 – 240 VAC |
Fusível de potência de entrada (a 100 V) | 15 A |
Frequência de entrada | 47 – 63 Hz |