
Jog Plus
O Jog Pluspermite-lhe utilizar a função de Jog em simultâneodurante a realização de outras tarefas. Pode ser utilizado quando uma costura do robot requer um pequeno movimento manual para atingir o ponto alvo.
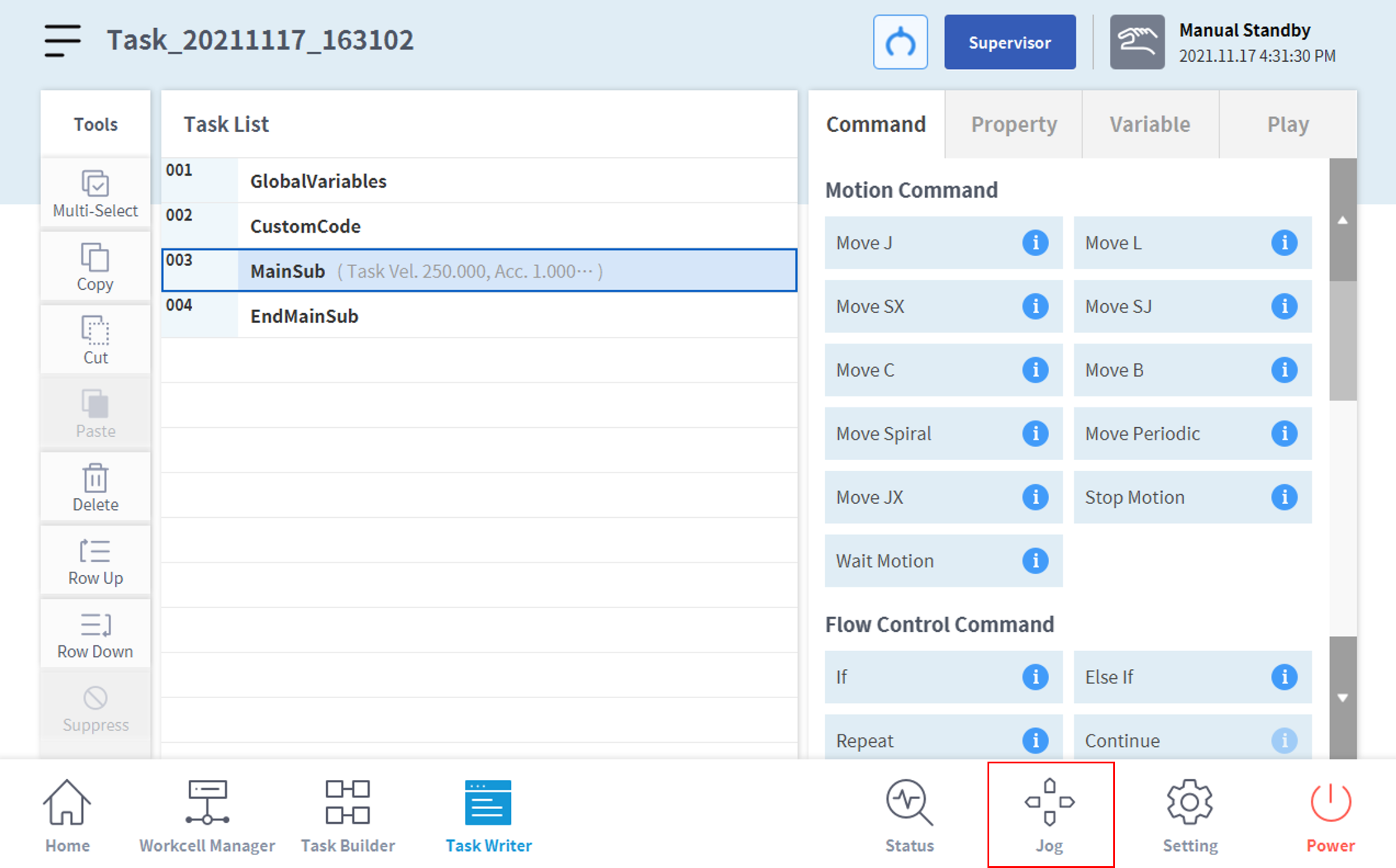
O Jog Plus pode ser ativado por:
- No menu principalna parte inferior do ecrã, prima e mantenha premido o botão de Jog durante mais de um segundo.
O ecrã Jog Plus está ativo.
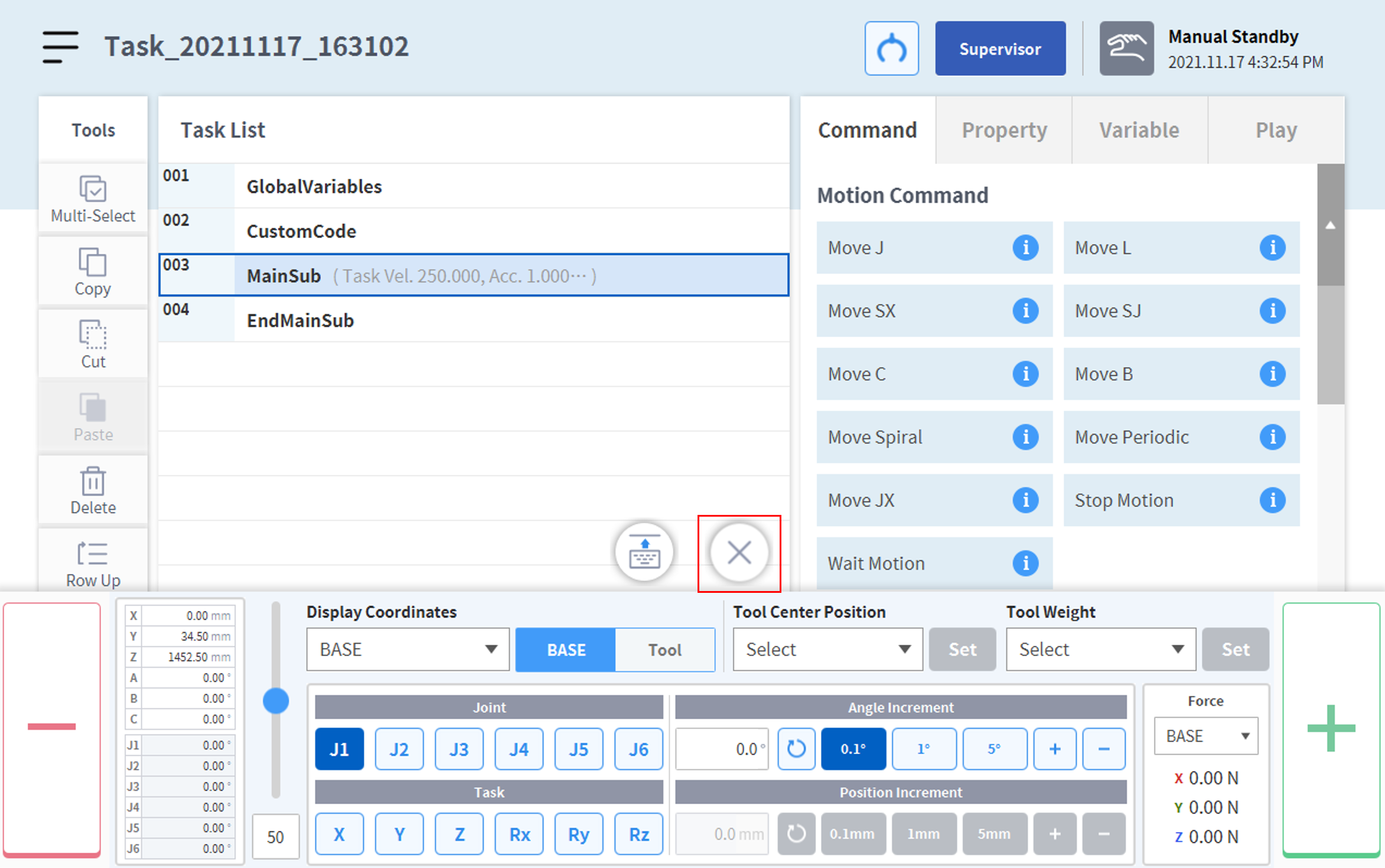
O Jog Plus pode ser desativado premindo o botão "X".
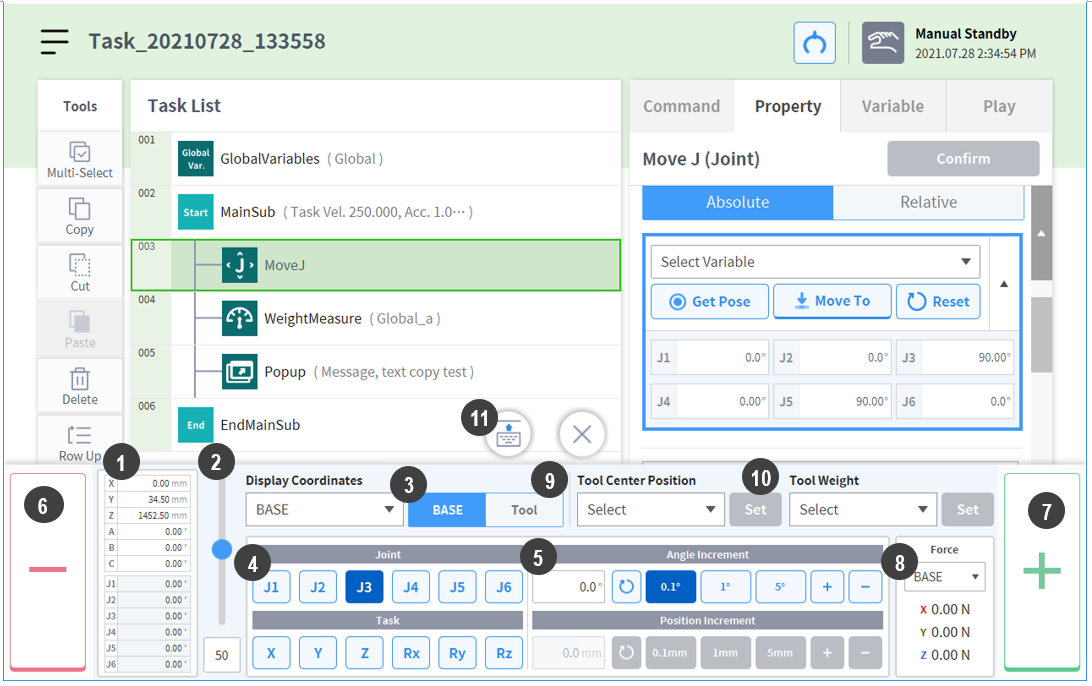
Número | Item | Descrição |
1 | Posição atual do robô | Apresenta a posição do robot em relação às coordenadas Set Display (Definir apresentação). |
2 | Velocidade do modo manual | Define a velocidade do movimento do robô no modo manual. Arraste o ponteiro do cursor para ajustar a velocidade. Se o ponteiro do cursor for 100%, a velocidade máxima para a junta correspondente é de 30 graus/s no separador Jog e a velocidade máxima para a tarefa é de 250 mm/s. Esta velocidade afeta apenas a velocidade a que os botões de movimento e de movimento manobre o robot. |
3 | Definir ponto de referência | Define o ponto base para alinhar o sistema de coordenadas da tarefa.
|
4 | Selecione Axis (Eixo) | Selecione o eixo que pretende mover.
|
5 | Selecione Increment (Incremento) |
|
6 | Botão Move – (Mover) | Prima e mantenha premido o botão para mover o eixo selecionado na direção - pela posição Increment (Incremento). |
7 | Botão de movimento | Prima e mantenha premido o botão para mover o eixo selecionado na direção ascendente pela posição de incremento. |
8 | Monitorização de força | Lista as forças externas que se desenvolvem em relação ao sistema de coordenadas selecionado. |
9 | TCP Settings (Definições TCP) | Ativar TCP. |
10 | Definições de peso da ferramenta | Define o peso da ferramenta. |
11 | Jog e reposicione | Move a posição do botão rotativo para cima ou para baixo do ecrã. |