
Itens da célula de trabalho - Adicionando posições de montagem do robô
OPTIONAL EASY 3 MIN
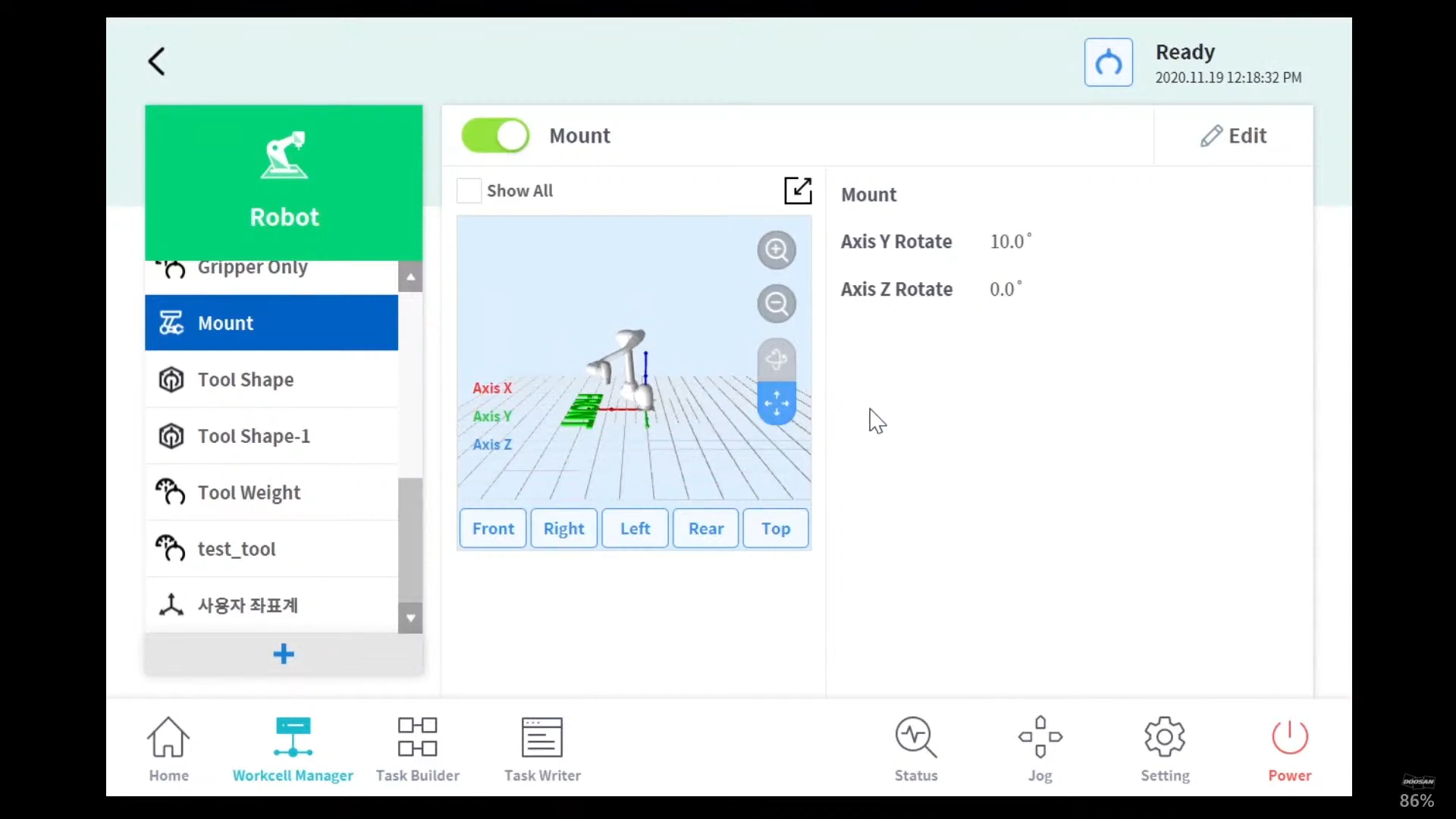
A posição de instalação do robô 
- Pode utilizar a funcionalidade Medição automática para medir o ângulo de instalação. Se a inclinação for inferior a 5 graus, o cálculo automático não está disponível.
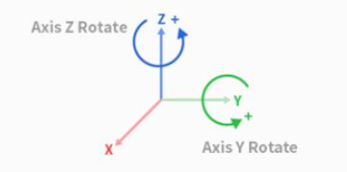
- Quando fixar o Robô ao teto ou à parede, pode definir o ângulo de instalação do Robô com a rotação do eixo Y e a rotação do eixo Z.
- Recomenda-se a reposição do peso da ferramenta após a configuração do suporte, uma vez que o peso da ferramenta é medido com base na gravidade quando se utiliza o cálculo automático do peso da ferramenta.
Os itens das células de trabalho devem ser confirmados antes de o interrutor de báscula poder ser ativado para utilizar itens das células de trabalho.
Cuidado
- Ao configurar itens de célula de trabalho de montagem do robô, recomenda-se que também altere o sistema de coordenadas mundial. Se não alterar o sistema de coordenadas mundial, a postura do robô no ecrã do simulador de robôs no Teach-Pendant é apresentada como a atitude que definiu numa superfície plana (predefinição).