
Definição das coordenadas do utilizador
Pode definir um sistema de coordenadas que represente o alvo do trabalho. Esse sistema de coordenadas é chamado de sistema de coordenadas do usuário e é distintodo sistema de coordenadas base e mundial do robô. Você pode definir a pose do seu sistema de coordenadas em relação ao sistema de coordenadas base ou mundial, e também pode selecionar seu sistema de coordenadasao ensinar e especificar movimento com o robô no Task Builder e no Task Writer. 
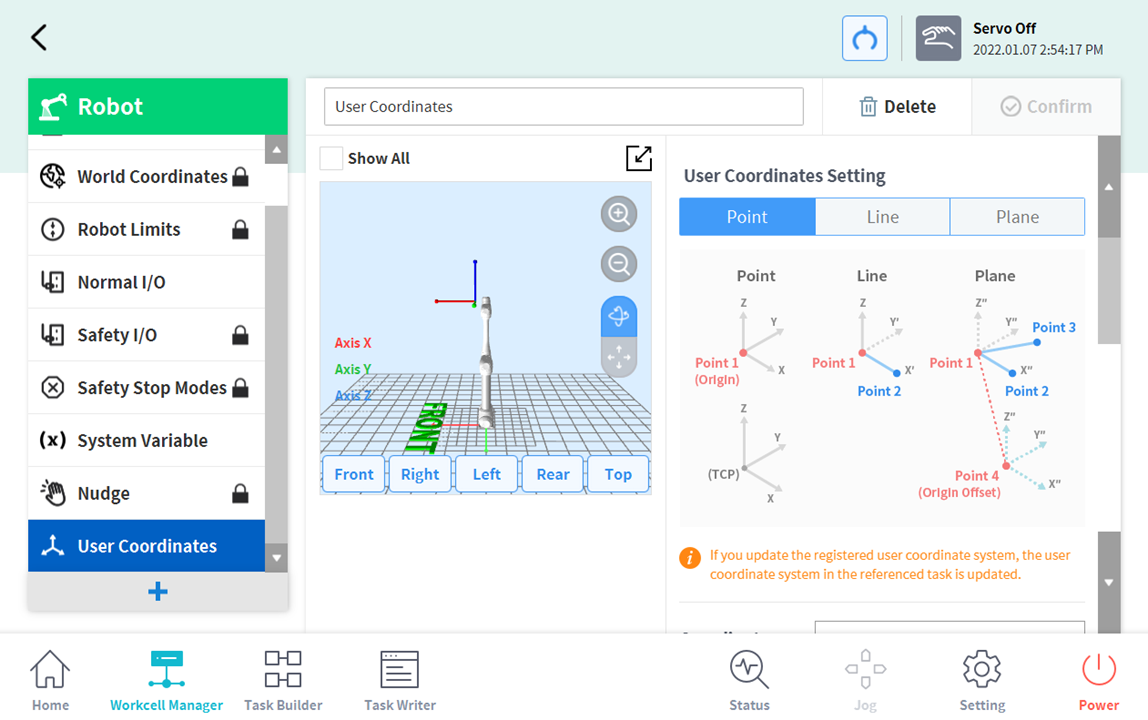
- Introduza os valores necessáriospara a configuração.
- Certifique-se de que consulta a imagem e as precauções para o sistema de coordenadas do utilizador.
- Você pode criar um sistema de coordenadas sobre um ponto, dois pontos ou três pontos.
- Pode importar as coordenadas da paleta a partir das Opções Avançadas e aplicá-las aos pontos do seu sistema de coordenadas.