
Configurar o Smart Pendant
Cuidado
Configurar o Smart Pendanté um ecrãpara configurar as funcionalidades opcionais da série A.
- Selecione o menu pendente inteligente localizado na área do menu Configuração do robô.
- As informações atualmente definidas são apresentadasna janela Settings Management (Gestão de definições).
- Altere a opção Utilizar Smart Pendant para Ligado.
- Se reiniciar durante a utilização do Smart Pendant On, este entra no modo de controlo remoto.
- Selecione uma tarefa
- Tarefas a serem usadasno modo pendente inteligente.
- Clique no botão Confirmar e, em seguida, clique no botão Iniciar pendente inteligente.
- Será levado para o Smart Pendant Display dedicado, que irá ativar os comandosutilizando o Smart Pendant.
- Quando entra no modo pendente inteligente numa janela, o interrutor para pendente inteligente também ocorre na pendente de falha.
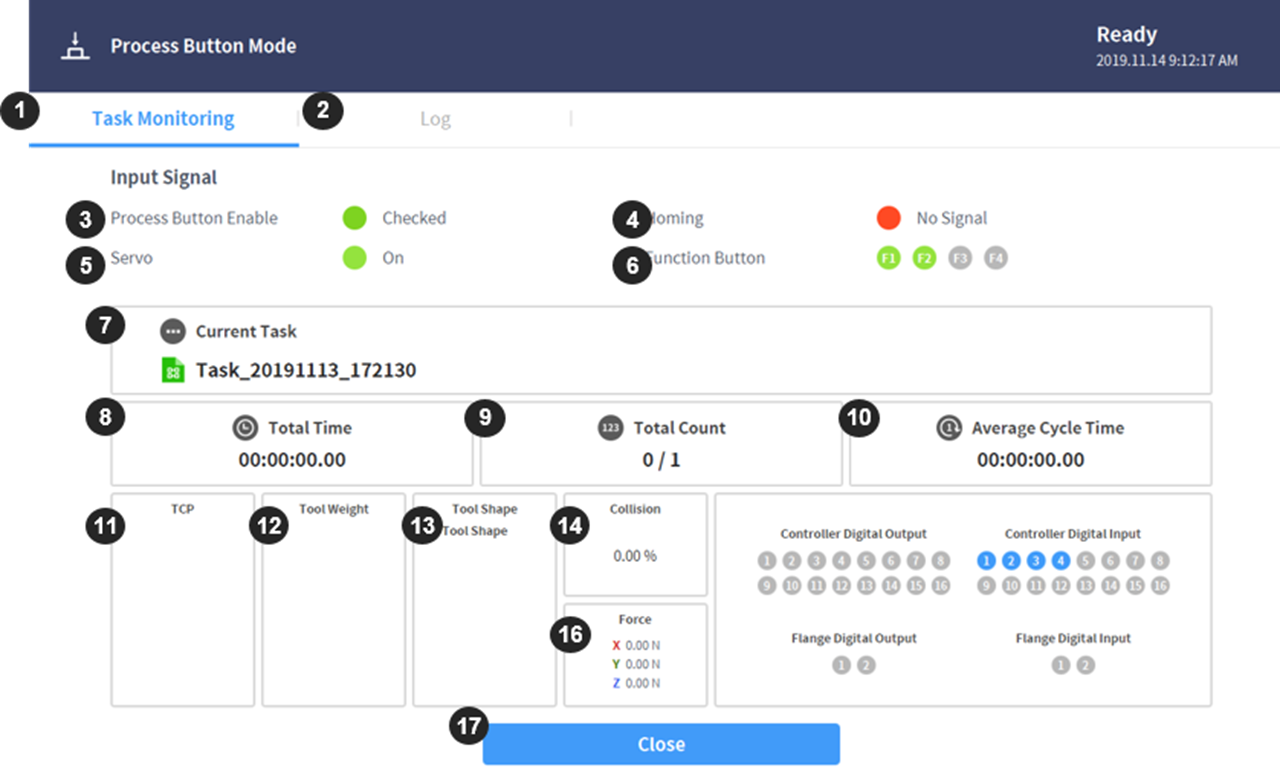
Número | Item | Descrição |
1 | Guia Monitoramento de tarefas | Uma guia que exibe os sinais de entrada do pendente inteligente e as informações de monitoramento necessárias durante a execução da tarefa |
2 | Separador Log (Registo) | Uma guia que exibe mensagens de log coletadas durante a execução da tarefa |
3 | Sinal de ativação pendente inteligente | Quando o Smart Pendant é conetado com êxito ao controlador, ele é verificado (verde). |
4 | Sinal de Homming | A luz indicadora é verificada(verde) quando o botão de homming (Início) no Smart Pendant é premido |
5 | Sinal de ativação/desativação do servo | Apresenta o estado de ativação/desativação do servo. |
6 | Sinal do botão de função | P1-P4 Prima o indicador de estado. |
7 | Current Task | A parte do Smart Pendant que representa a tarefa a ser usada |
8 | Total Time | Tempo total de execução da tarefa |
9 | Total Count | Contagem de lacunas de tarefas |
10 | Average Cycle Time | Tempo médio de jogo por ronda de tarefas |
11 | Indicador TCP | As informações TCP atualmente em uso pela tarefa |
12 | Indicador de peso da ferramenta | Informações de peso da ferramenta atualmente em uso |
13 | Indicador de forma da ferramenta | Informações sobre a forma atual da ferramenta |
14 | Collision | Informação do limiar de colisão |
15 | Force | Forçar informação |
16 | Digital / Flange IO | Informação de E/S digital/flangeada |
17 | Close | Para sair do modo pendente inteligente. |
Saber
Quando ocorre uma paragem de emergência ou uma paragem de proteção no modo pendente inteligente:
- Paragem de emergência: É apresentada a janela de contexto de paragem de emergência. Depois de remover a causada paragem de emergência, puxe ou rode o interrutor de paragem de emergência para reiniciar e fechar automaticamente a janela pop-up.
- Pare a proteção para entrar no estado Servo desligado: É apresentada uma janela pop-up vermelha Stop Protection(proteção contra paragem). Se premir o botão Servo On (Ligar Servo) no Smart Pendant (Pingente Inteligente) depois de remover a causa da paragem ...proteção, a unidade servo-robot liga-se e a janela pop-up fecha-se automaticamente.
- Falhas de proteção entrando no estado interrompido: É apresentada uma janela pop-up amarela Stop Protection(Proteção contra paragem). Quando a causa da paragem de proteção for eliminada, prima o botão Reset (Repor) no Smart Pendant para mudar o estado do robot para Manual Standby( Modo de espera manual),Auto Standby(Modo de espera automático) ou Transição para o estado de espera normal de umdos estados de espera HGC. Para violações de segurança em que a causa não possa ser eliminada sem mover o robot, pode utilizar a função Clockpit Escape by Cockpit.
- Para obter mais informaçõesEstado específico do modo e cores do LED da flange, consulte "."