Configurar o assistente remoto
- Selecione o menu Remote Assistant(Assistente remoto) em Robot Settings (Definições do robô) na área de menu Settings (Definições).
- As informações atualmente definidas são apresentadasna janela Settings Management (Gestão de definições).
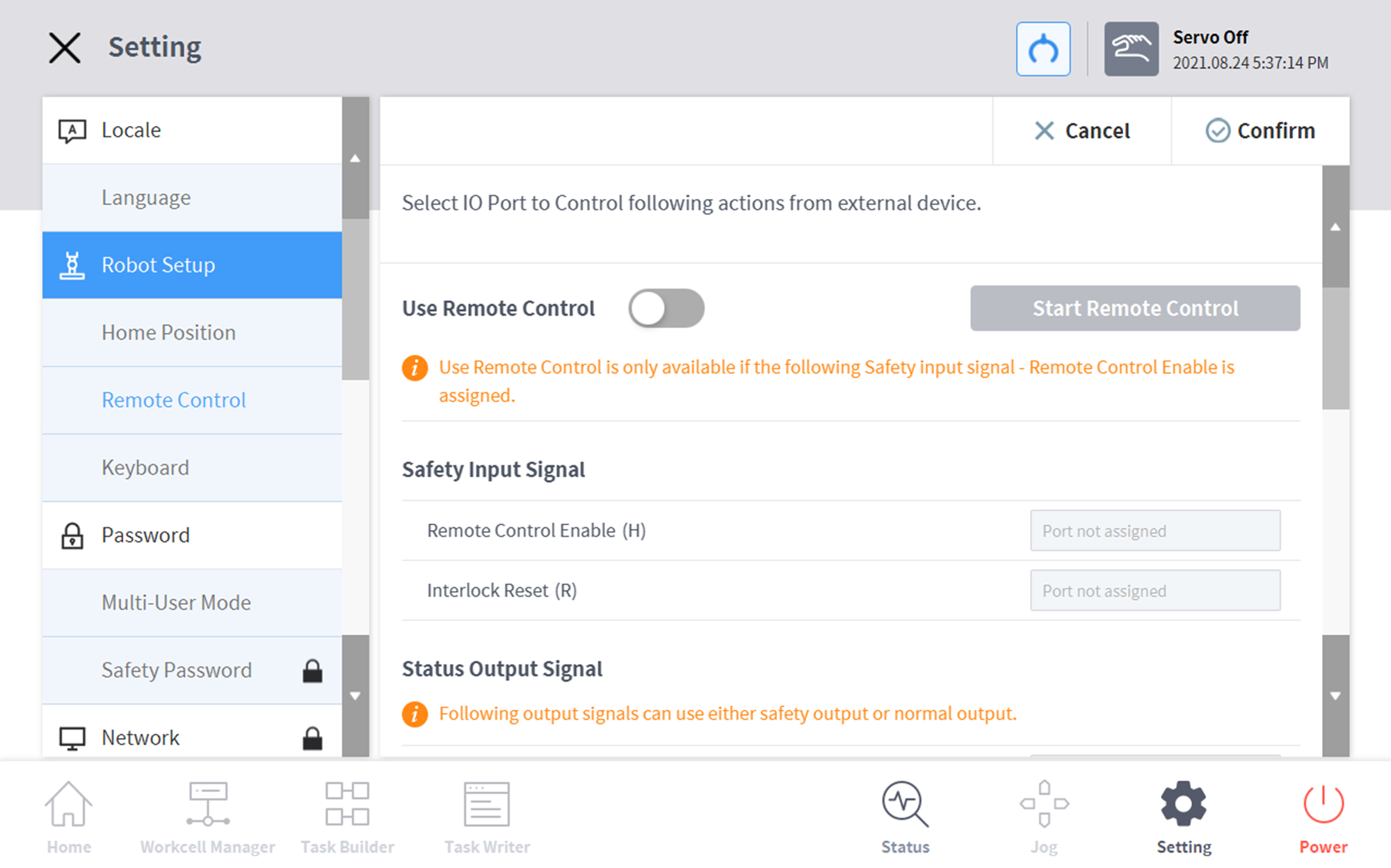
- Altere o botão Utilizar telecomando para Ligado
- Se reiniciar o telecomando enquanto este estiver definido para LIGADO, o modo de telecomando é introduzido.
- Introduza o sinal de saída, o sinal de entrada e as seleções de tarefas de chamada predefinidas
- Se o sinal de entrada de segurança não estiver definido, não pode ser definido. Selecione Workcell Manager > Safety I/O > Input Tab > Edit > Porte defina Remote Control Enable (H).
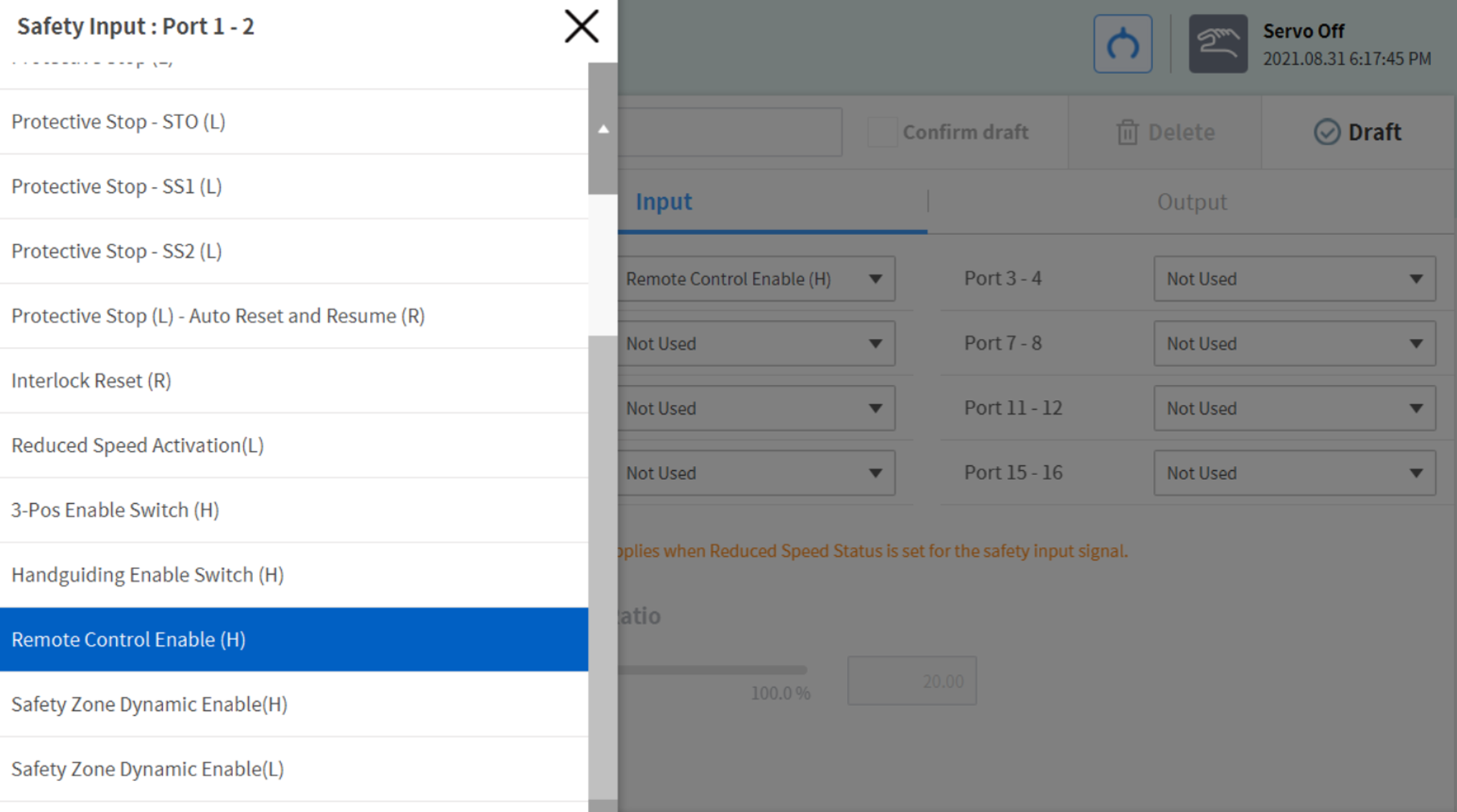
- Se o sinal de entrada de segurança não estiver definido, não pode ser definido. Selecione Workcell Manager > Safety I/O > Input Tab > Edit > Porte defina Remote Control Enable (H).
- Prima o botão OKquando terminar.
- As suas preferências de utilização do assistente remoto estão concluídas.
- Para permitir o controlo remoto a partir de um dispositivo externo, prima o botão Iniciar do telecomandopara entrar no modo de controlo remoto.
- São apresentadas as informações da tarefa a executara partir do dispositivo externo.
- Deve ser apresentado um sinal verde no botão de ativação do telecomandopara executar uma ação introduzida por um dispositivo externo.
- Se o botão de ativação do telecomando apresentar um sinal vermelho, introduza o sinal de ativação do dispositivo externo.
Saber
- Quando ocorre uma paragem de emergência ou uma paragem de proteção no modo de assistente remoto:
- Paragem de emergência: É apresentada a janela de contexto de paragem de emergência. Depois de remover a causada paragem de emergência, puxe ou rode o interrutor de paragem de emergência para reiniciar e fechar automaticamente a janela pop-up.
- Pare a proteção para entrar no estado Servo desligado: É apresentada uma janela pop-up vermelha Stop Protection(proteção contra paragem). Depois que a causa da parada de proteção for eliminada , o Acionamento do Servo do Robô será ligado e a janela pop-up será fechada automaticamente quando o sinal de Servo Ligado for inserido.
- Falhas de proteção entrando no estado interrompido: É apresentada uma janela pop-up amarela Stop Protection(Proteção contra paragem). Quando o sinal de reposição do bloqueio é introduzido depois de a causa da paragem ...proteção ser removida, o estado do robot é definido para modo deespera manual, modo de espera automático, Transição para o estado de espera normal de umdos estados de espera HGC. Para violações de segurança em que a causa não possa ser eliminada sem mover o robot, pode utilizar a função Clockpit Escape by Cockpit.
- Para obter mais informaçõesEstado específico do modo e cores do LED da flange, consulte "."
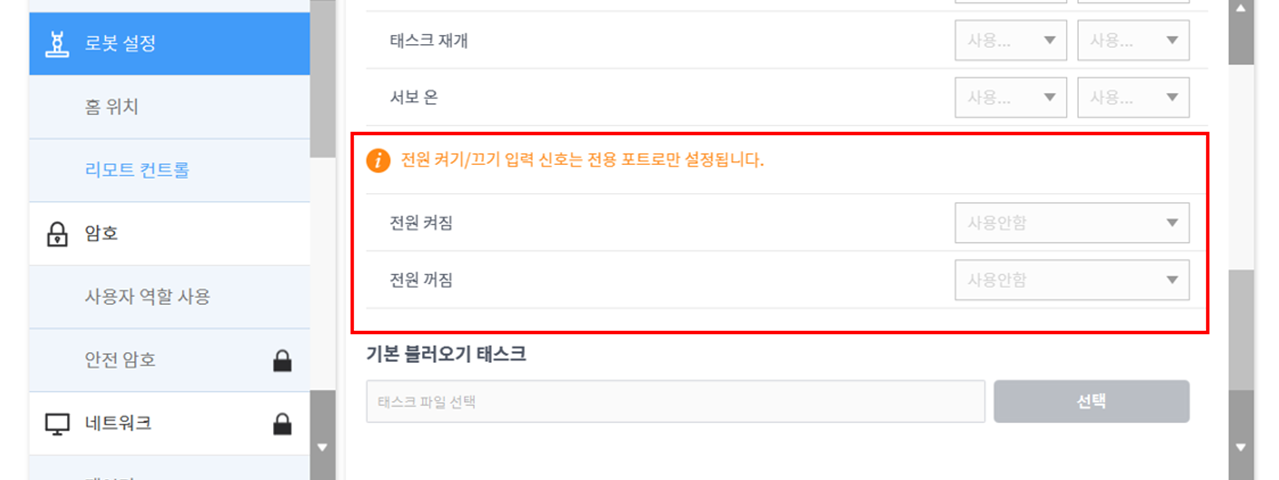
- Pode ligar ou desligar o robotutilizando as definições do telecomando.
- Pressione o botão Configurações no menu principal e selecione Assistente Remoto em Configurações do Robô.
- Selecione uma porta de entrada dedicada para o telecomando para utilizar as funções de ligar ou desligar.