
Configuração do robô - Definir as coordenadas do mundo
OPTIONAL NORMAL 3 MIN
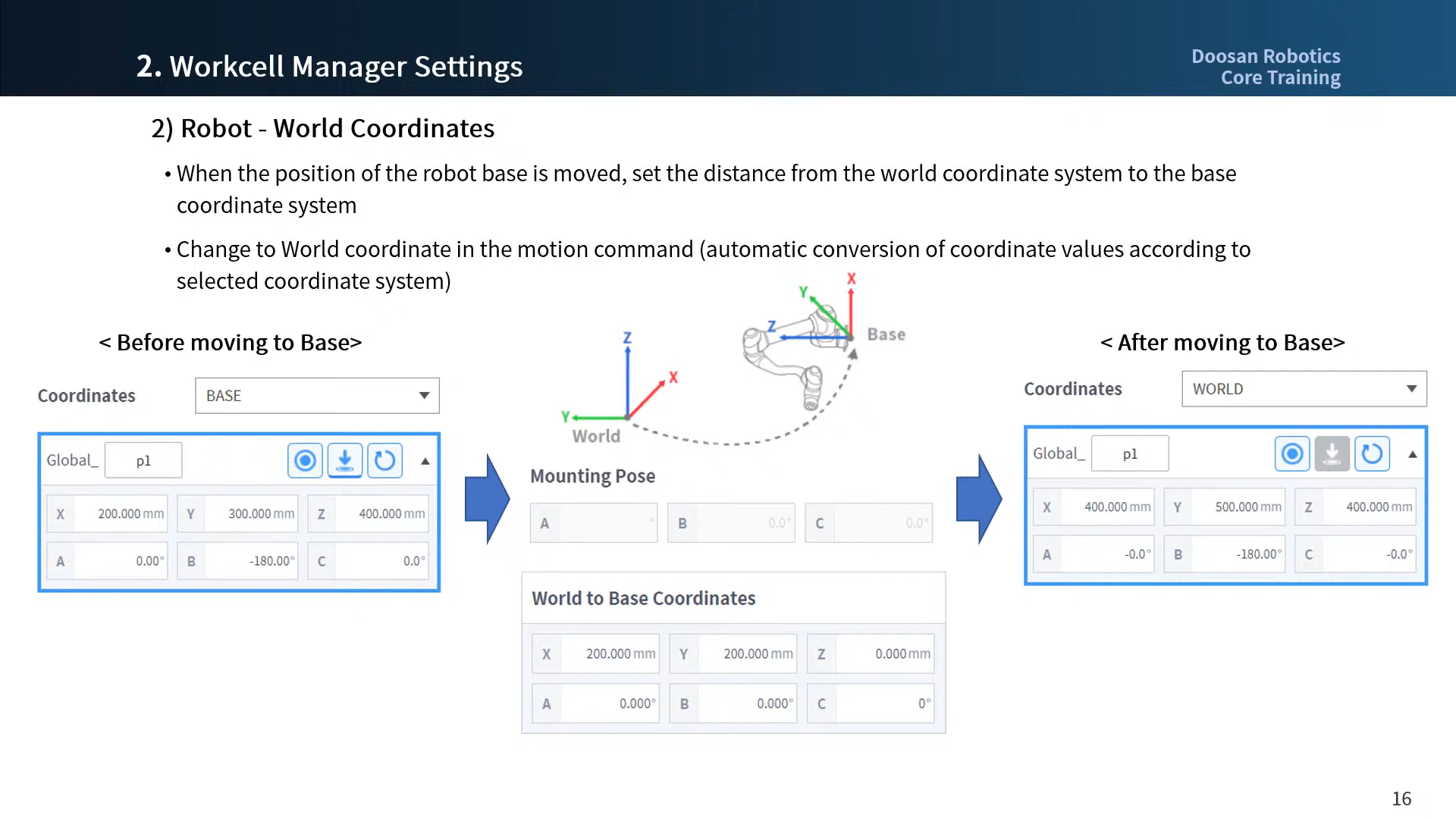
O Sistema Mundial de Coordenadas pode ser definido selecionando Workcell Manager > Robot > World Coordinates (Gestor de células de trabalho > Robô > Coordenadas mundiais). Para obter mais informações, consulte Configurando as coordenadas do mundo .
- O Sistema Mundial de Coordenadas é usado quando a posição de instalação da base do robô tiver sido fisicamente movida/girada.
- Se você alterar o Sistema de Coordenadas Mundiais, a tela Simulador do Robô refletirá o mesmo movimento/rotação.
Saber
O Sistema Mundial de Coordenadas também pode ser utilizado se a posição base e o ângulo tiverem sido alterados desde o final da junção robótica. Se alterar o sistema de coordenadas de todos os movimentos de uma tarefa que criou anteriormente utilizando a junção robótica de base para mundo, o desvio é aplicado às coordenadas de todos os movimentos, tanto quanto o sistema de coordenadas mundial se moveu/rodou.