Compreender os padrões básicos de operação dos comandos de especialidade
Os comandos de especialidade são baseados em vários padrões operacionais.
O robôdeve ser definido para o peso da ferramenta atualmente montada e para a posição central da ferramenta (TCP), de forma a iniciar o trabalho, epara a posição de aproximação ea posição de recolha numa direção vertical a partir do ponto de referência em que a ferramenta atual funcionaTer um é o padrão operacional padrão dos comandos de especialidade.
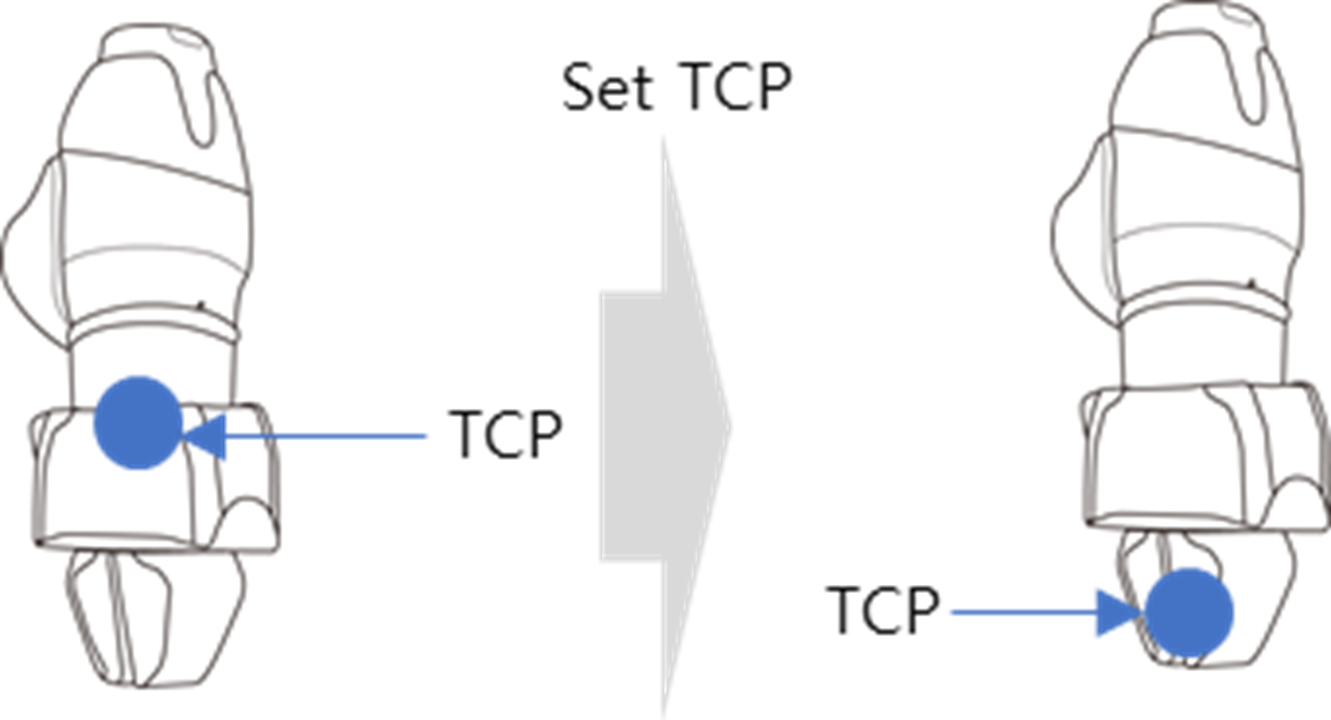
Definições TCP: O deslocamento TCP é definido automaticamente para ser alteradoao usar os comandos de especialidade no efetor final. A etapa inicial para executar os comandos End effector Skills contém as configurações de deslocamento para TCP no efetor final. Se o deslocamento TCP for alterado, a função Blending Motion, que se vincula ao comando anterior Motion, não estará disponível para suavizar a transição de movimento.
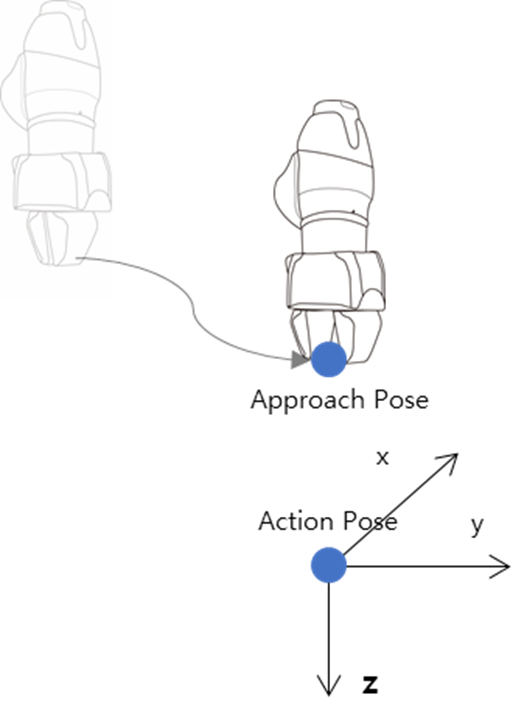
Vá para a posição de aproximação: Localizaçãopara aceder à localização do ponto de trabalho. A direção Z do sistema de coordenadas da ferramentaé definida por predefinição em relação ao ponto de trabalhoe também pode selecionar uma direção diferente. Calculado automaticamente com a distância de aproximação introduzidapara o ponto de trabalho e movido para essa posição.
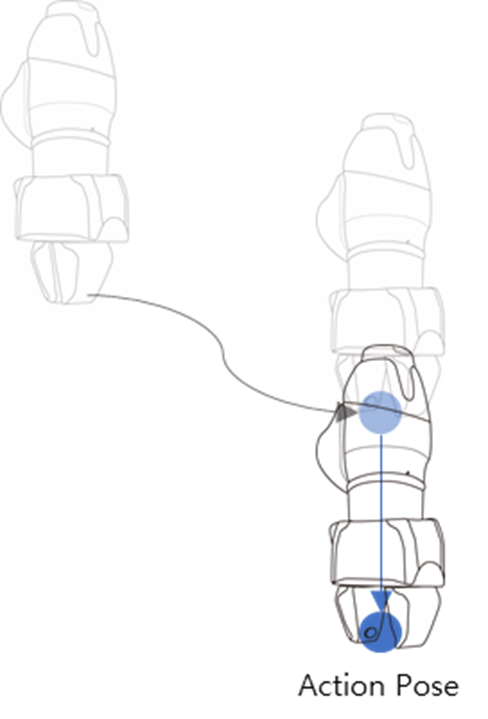
Vá para a posição de referência: O localonde o efetor final irá executar o trabalho na peça de trabalho do efetor final. 
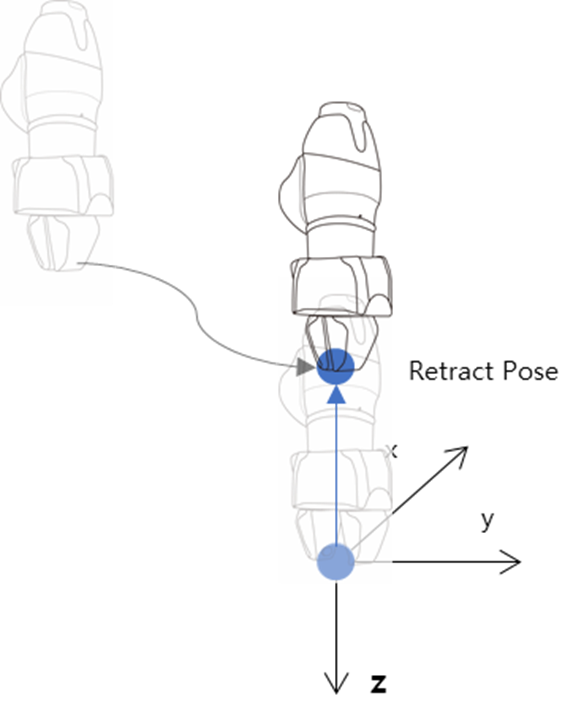
Mover para a posição de recolha: Posição para segurar e mover objetos com segurança para outros locais. A ferramenta coordena a direção Z do sistema relativamente ao ponto de trabalhoe pode também selecionar outras direções. Calculado automaticamente como a distância de recolha introduzida para o ponto de trabalho e movido para essa posição.
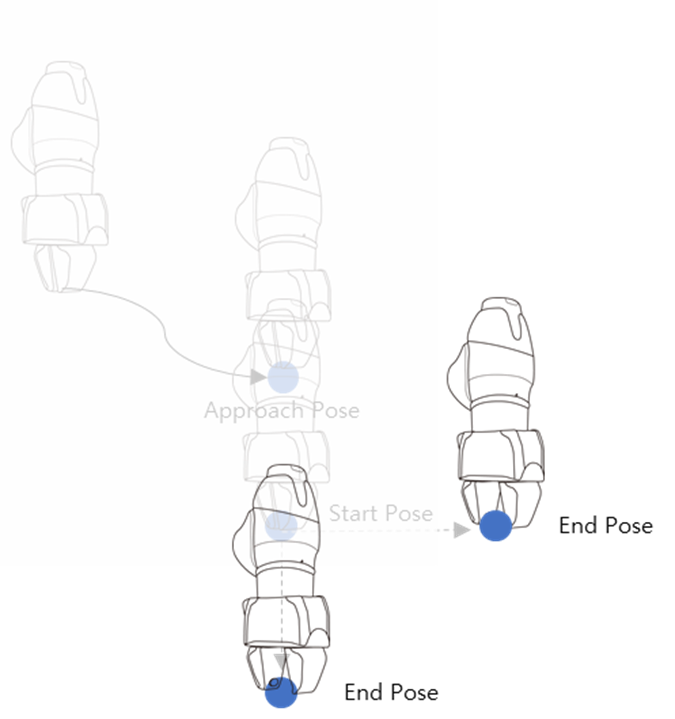
Vá para a posição inicial: Se o alvo do efetor final não estiver concluído numa única operação, pode existir um ponto de início e um ponto de paragem e o ponto de início da operação é o ponto de início onde a operação começa através da entrada na perna de trabalho. (Exemplo: Door_OpenClose Skill - Start Pose)
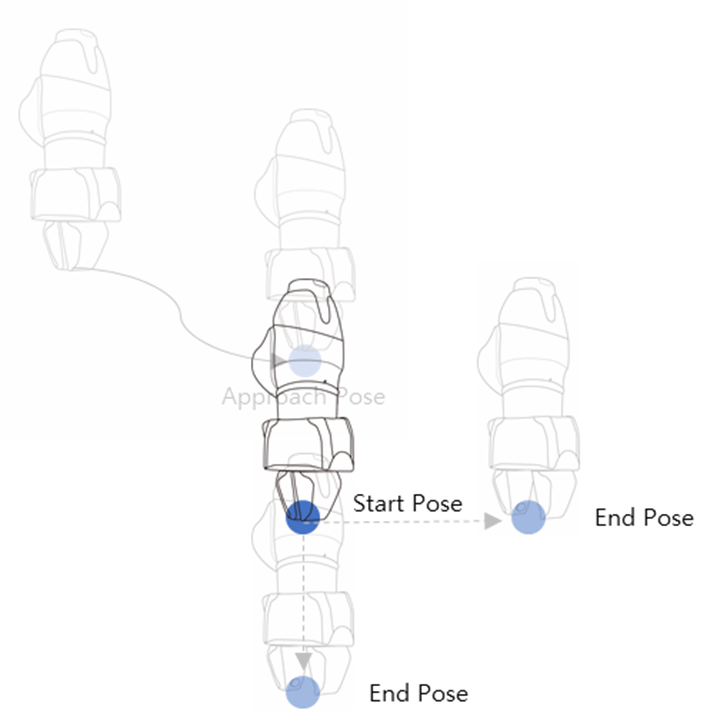
Mover para a posição final: Se a peça de trabalho em que o efetor final está agindo não terminar em um movimento, pode existir um ponto de início e ponto de parada, e o ponto final do trabalho é onde o trabalho entra na perna de trabalho e termina o trabalho. (Exemplo: DOOR_OpenClose Skill – Posição final)