
Ligação I/O do controlador
Os terminais de E/S do controlador permitem que dispositivos externos sejam conetadosao controlador, além do coletor e do pendente de falha. Pode ligar equipamento de segurança, como interrutores de paragem de emergência, cortinas de luz e tapetes de segurança, bem como uma variedade de periféricos necessários para configurar a célula de trabalho robótica, tais como válvulas de sola pneumática, relés, PLC e codificadores de correias transportadoras.
A E/S do controladorestá organizadada seguinte forma:
- Bloco de terminais de entrada de contacto de segurança(TBSFT): Liga os dispositivos necessários para paragem de emergência, paragem de proteção
- Bloco de terminais de alimentação ( TBPWR) de entrada/saída digital (E/S)
- Blocos de entrada/saída digital configuráveis (E/S) (TBCI1-4, TBCO1-4) para ligar periféricos necessários para operações robóticas
- Bloco de terminais de entrada/saída analógica (E/S) (TBAIO)
- O bloco de terminais de entrada do codificador (TBEN1, TBEN2)
- Bloco de terminais de saída de contacto de segurança (TBSTO): Utilizado para parar o robô quando este está ligado à linha de alimentação de um periférico do robô e o robot está no estado STO
A figura abaixo mostra o layout da interface elétrica dentro do controlador.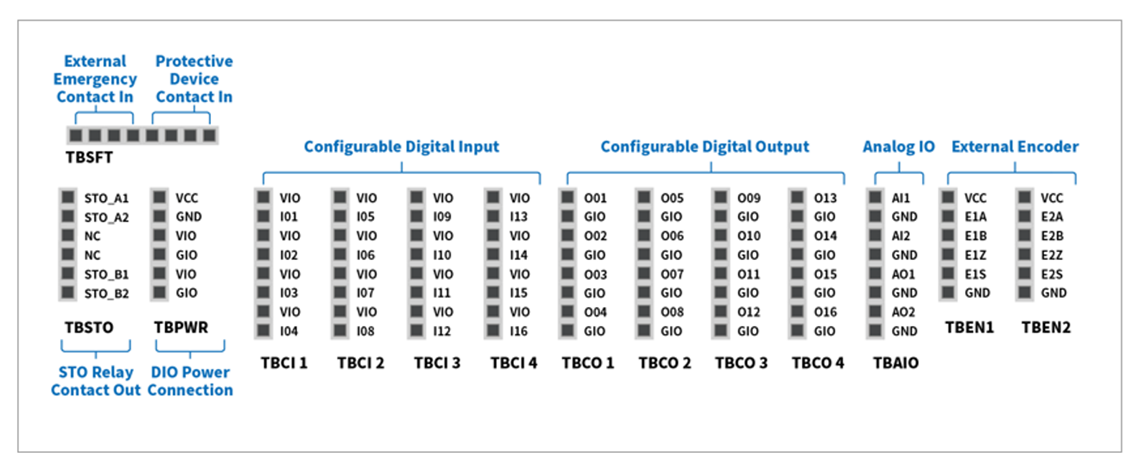
Cuidado
- Para evitar possíveis danos no produto e possíveis avarias, desligue sempre a alimentação quando ligar os terminais à E/S do controlador
- A Doosan Robotics não compensará a ligação inadequada dos terminais ou danosno produto devido a negligência do utilizador.
- Se desligar a alimentação do controlador, certifique-se de que a alimentação da ligação externa também está desligada.